Algorithm Overview
DCReg is organized around three core modules.
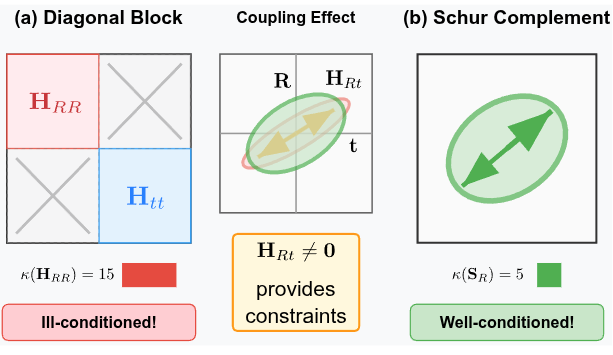
Starting from the ICP normal equation H = J^T J, DCReg forms the Schur complements for rotation and translation:
S_R = H_RR - H_Rt H_tt^{-1} H_tRS_t = H_tt - H_tR H_RR^{-1} H_tR
This removes misleading coupling effects and exposes observability directly in the decoupled subspaces.
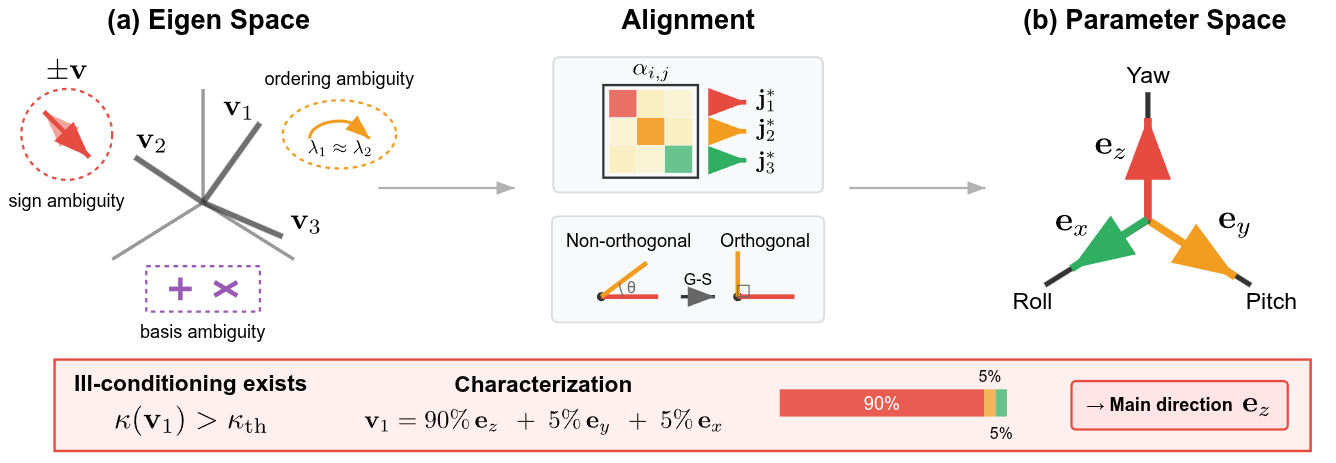
The raw Schur eigenvectors are aligned to physical motion axes:
- rotation:
roll / pitch / yaw - translation:
x / y / z
This step produces:
- raw Schur eigenvalues
- aligned eigenvalues in physical coordinates
- degeneracy mask
- axis contribution ratios
- clamped eigenvalues used by the preconditioner
| Schur-Based Detection | Physical-Axis Characterization |
|---|---|
 |
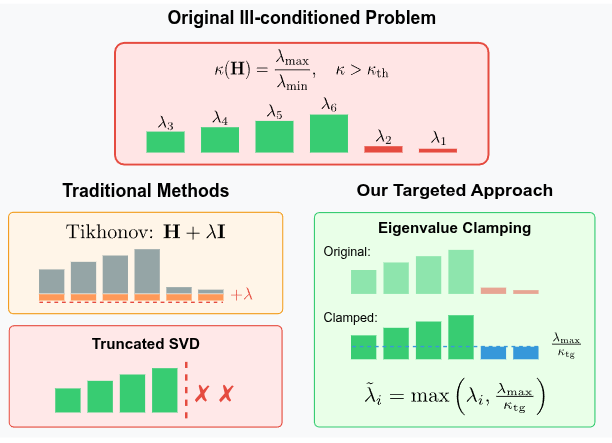 |
DCReg clamps only the weak aligned eigenvalues, builds a block-diagonal preconditioner, and solves the normal equation with PCG. This improves stability without over-regularizing the fully observable directions.