URDF全称为Unified Robot Description Format,也就是统一机器人描述格式,它是ROS中一个非常重要的机器人模型描述格式,ROS同时也提供URDF文件的C++解析器,可以解析UDRF文件中使用XML格式描述的机器人模型
用于描述机器人某个刚体部分的外观和物理属性,如:尺寸、颜色、形状、惯性矩阵、碰撞参数等等
结构如下所示:
<link name="<link name>">
<inertial>...</inertial>
<visual>...</visual>
<collision>...</collision>
</link><visual>用于描述link部分的外观参数<inertial>用于描述link部分的惯性参数<collision>用于描述link部分的碰撞属性
根据机器人关节的运动形式,可以将关节分为六种类型:
continuous: 旋转关节,一个不受限制的, 绕着一根轴的转动副
revolute: 旋转关节,一个转动角度受到限制的, 绕着一根轴的转动副
prismatic: 滑动关节,一个沿着一根轴的滑动副, 并且有限位
fixed: 固定关节,不允许运动的特殊关节
floating: 浮动关节,允许进行平移、旋转运动
planar: 平面关节,允许在平面正交方向上平移或旋转
机器人关节的主要作用就是连接两个刚体,这两个刚体被称为parent link和child link
结构如下所示:
<joint>
<parent link="parent_link"/>
<child link="child_lind"/>
<calibration .../>
<dynamics damping .../>
<limit effort .../>
...
</joint><calibration>关节参考位置,用于校准关节的绝对位置<dynamics>用于描述关节的物理属性,常用于动力学仿真<limit>用于描述运动的一些极限值,包括关节运动的上下限位置、速度限制等等<mimic>用于描述该关节与已有关节的关系<safety_controller>用于秒栓全控制器的参数
该标签是完整机器人模型的最顶层标签,标签和标签都必须包含在标签内
该标签用于描述机器人模型在Gazebo中仿真所需要的参数,包括机器人材料的属性、Gazebo插件等等
该标签不是必须部分,只有在进行Gazebo仿真时会用到
在已建立的工作空间下创建功能包
$ cakin_create_pkg mrobot_description urdf xacro其中xacro包作用是更大XML表达式的宏来构建更短、更易读的XML文件
xacro是一种XML宏语言。
补充:宏语言是一种强有力的工具语言,可以用来描述软件和解决软件移植等问题,用于书写宏指命和宏定义的表示法和规则。宏语言是一类编程语言,其全部或多数计算是由扩展宏完成的。宏语言并未在通用编程中广泛使用,但在文本处理程序中应用普遍。
在存储URDF的功能包中包含了urdf、meshes、launch、config四个文件夹:
- urdf:用于存放机器人模型的URDF或者xacro文件
- meshes:用于放置URDF中引用的模型渲染文件
- launch:用于保存相关启动文件
- config:用于保存rviz的配置文件
模拟创建一个机器人的底盘模型,该模型有7个link和6个joint:
其中7个link分别是:1个机器人底板、2个电机、2个驱动轮、2个万向轮
6个joint负责将驱动轮、万向轮、电机安装到底板上,并设置相应的连接方式
<?xml version="1.0" ?>
<robot name="mrobot_chassis">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.005" radius="0.13"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<joint name="base_left_motor_joint" type="fixed">
<origin xyz="-0.055 0.075 0" rpy="0 0 0" />
<parent link="base_link"/>
<child link="left_motor" />
</joint>
<link name="left_motor">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.02" length = "0.08"/>
</geometry>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.0485 0" rpy="0 0 0"/>
<parent link="left_motor"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.033" length = "0.017"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="base_right_motor_joint" type="fixed">
<origin xyz="-0.055 -0.075 0" rpy="0 0 0" />
<parent link="base_link"/>
<child link="right_motor" />
</joint>
<link name="right_motor">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.02" length = "0.08" />
</geometry>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
</visual>
</link>
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0 -0.0485 0" rpy="0 0 0"/>
<parent link="right_motor"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.033" length = "0.017"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="front_caster_joint" type="fixed">
<origin xyz="0.1135 0 -0.0165" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0"/>
<geometry>
<sphere radius="0.0165" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
</robot>URDF提供了命令行工具liburdfdom-tools,可以帮助检查、梳理模型文件
$ sudo apt-get install liburdfdom-tools- 使用
check_urdf命令对mrobot_chassis.urdf文件进行检查
$ check_urdf mrobot_chassis.urdf结果如下所示:
- 使用urdf_to_graphiz命令查看模型整体结构
$ urdf_to_graphiz mrobot_chassis.urdf使用该命令后会在文件夹中生成一个pdf文件,展示了该模型的结构:

<?xml version="1.0" ?>
<robot name="mrobot_chassis">使用<robot>标签定义了一个机器人模型,并定义了该机器人名为mrobot_chassis
<link name="base_link"> <visual> <origin xyz=" 0 0 0" rpy="0 0 0" /> <geometry> <cylinder length="0.005" radius="0.13"/> </geometry> <material name="yellow"> <color rgba="1 0.4 0 1"/> </material> </visual></link>通过<visual>标签定义了该底盘的外观属性,将底盘想象成一个扁平的圆柱结构
<cylinder>标签定义了这个圆柱的半径和高
<origin>标签声明了这个圆柱底盘在空间内的三位坐标和旋转姿态,底盘的中心位于界面的中心点
<material>标签设置了颜色<color>
<joint name="base_left_motor_joint" type="fixed"> <origin xyz="-0.055 0.075 0" rpy="0 0 0" /> <parent link="base_link"/> <child link="left_motor" /></joint>该关节用于连接机器人底盘和左边驱动电机,这个关节的类型type="fixed"是固定关节
<origin>标签定义了该关节的起点,将该节点设置在需要安装电机的底盘位置
<link name="left_motor">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.02" length = "0.08"/>
</geometry>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
</visual>
</link>该段代码描述了左侧电机的模型,该电机模型被抽象为圆柱体并通过<geometry>标签进行配置
注意:由于之前定义了的joint设置连接到了底盘上,所以电机的坐标位置是想对于joint计算的
由于圆柱体默认是垂直于地面创建的,所以需要把圆柱体围绕x轴旋转90度(换算成弧度约为1.5707)
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.0485 0" rpy="0 0 0"/>
<parent link="left_motor"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>该关节属于continuous类型,这种类型的关节可以围绕着一个轴进行旋转,轮子就很适合这种类型
<origin>标签定义了该关节的起点,将起点放置在电机的一段
编辑launch
<launch>
<param name="robot_description" textfile="$(find mrobot_description)/urdf/mrobot_chassis.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mrobot_description)/config/mrobot_urdf.rviz" required="true" />
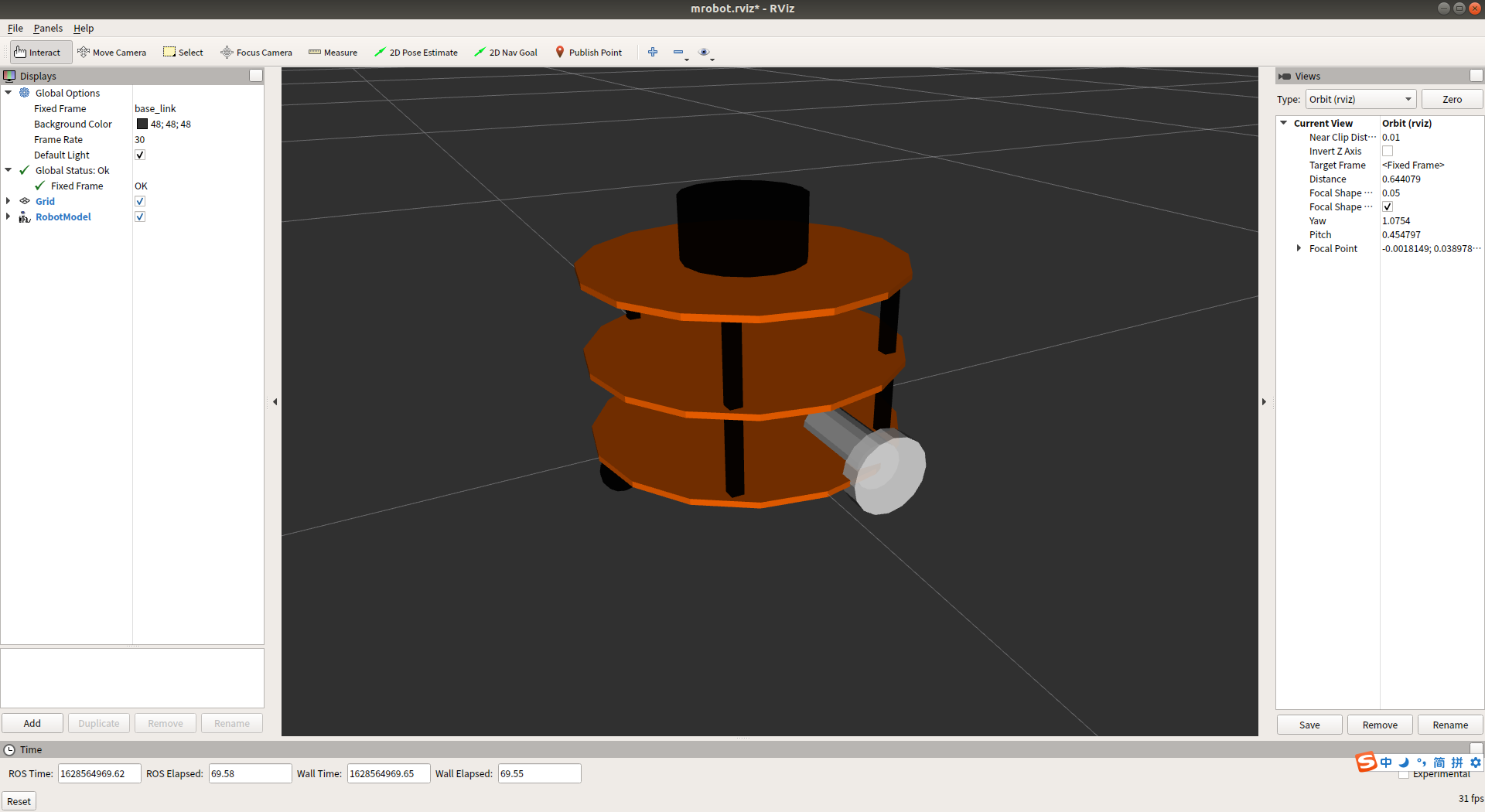
</launch>启动launch文件
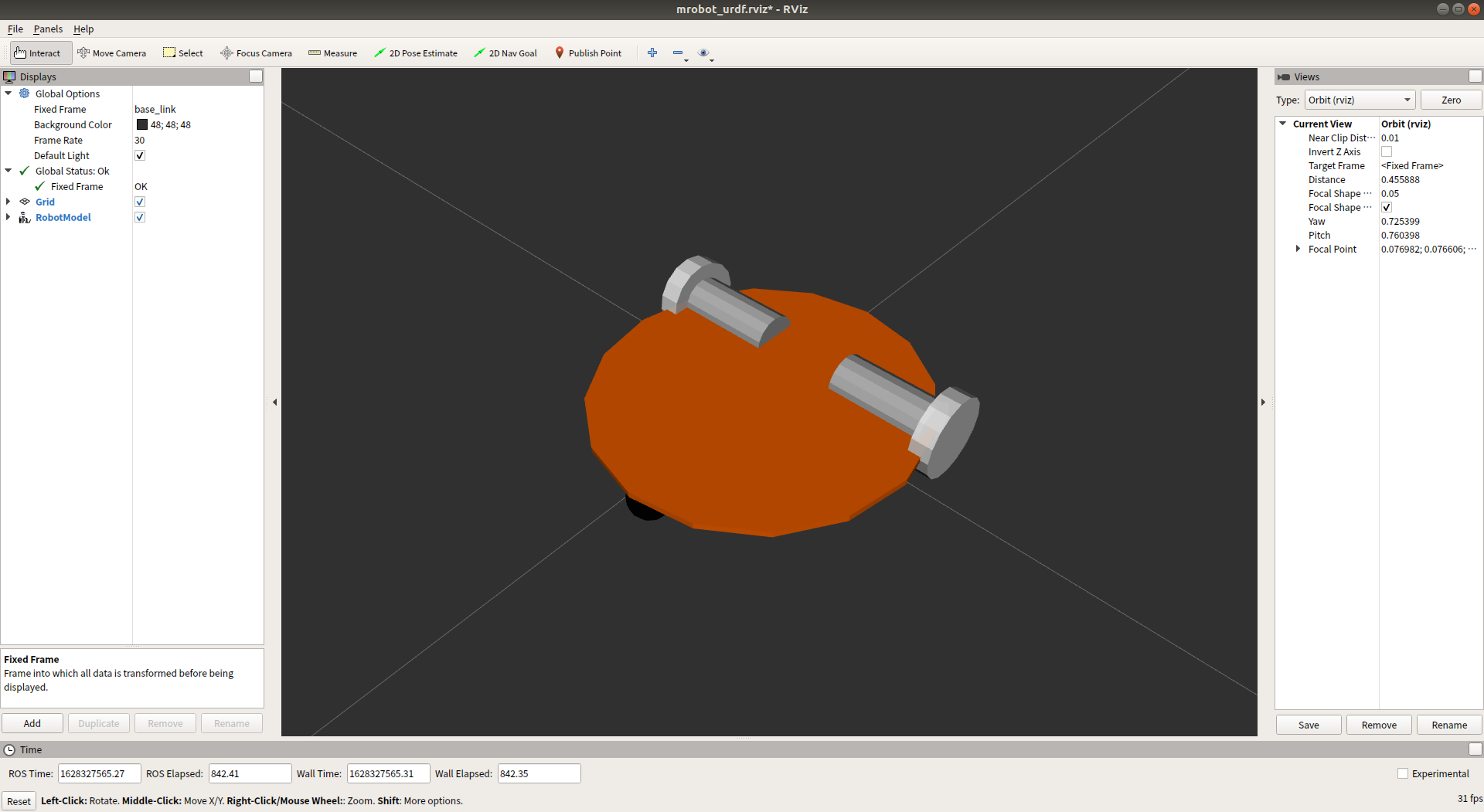
$ roslaunch mrobot_description display_mrobot_chassis_urdf.launch注意:一定要使用命令catkin_make编译并source后启动
展示模型如下所示:
<link name="base_link">
<inertial>
<mass value="2"/>
<origin xyz="0.0 0.0 0.0"/>
<inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.5"/>
</inertial>
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.005" radius="0.13"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<cylinder length="0.005" radius="0.13"/>
</geometry>
</collision>
</link>在base_link中添加<inertial>和<collision>标签,用于描述物体的物理属性和碰撞属性
- 惯性参数主要包含了物体的质量和惯性矩阵
如果是规则物体可以通过尺寸和质量等公式计算得到惯性矩阵
<collision>标签内容与<visual>内容几乎一致,因为本组模型都是较为简单的规则模型
如果是使用真是机器人模型可以使用抽象的方式,例如可以将机械臂的一根连杆抽象为圆柱体或长方体
- URDF缺点:在URDF文件中有很多内容除了参数,几乎都是重复的内容,可以使用代码复用技术。但是,URDF并不支持代码复用,导致一个真实的机器人模型将变得非常复杂
针对URDF模型的冗长,ROS有一种精简化、可复用、模块化的描述形式,即xacro
xacro有以下优点:
- 精简模型代码
- 提供可编程接口
xacro是URDF的升级版,模型文件的后缀名由.urdf更改为.xacro,而且在模型<robot>标签中需要添加对xacro的声明
<?xml version="1.0"?>
<robot name="robot_name" xmlns:xacro="http://www.ros.org/wiki/xacro">示例如下:
<!-- 常量的定义 -->
<xacro:property name="M_PI" value="3.14159"/>
<!-- 使用常量 -->
<origin xyz="0 0 0" rpy="${M_PI} 0 0">如果改动机器人模型直接对这些参数进行修改即可
在${....}中不仅可以调用常量还可以进行一些常用的数学运算
<origin xyz="0 0 0" rpy="${M_PI + 1 / 2} 0 0">xacro文件可以使用宏定义来声明重复使用的代码模块,而且可以包含默认参数,类似编程中的函数概念
比如:在MRobot模型中底板上有两层支撑板,支撑板之间由八根支撑柱连接而成,而支撑柱除了位置不同,模型是完全一样的,此时就可以使用宏定义的方式对支撑柱进行定义
宏定义示例模板:
<!-- 模板的定义 -->
<xacro:xacro name="macro_definition_name" params="parameter01 parameter02 parameter03">
<joint name="joit_${parameter01}" type="fixed">
<origin xyz="${parameter01} ${parameter02} ${parameter03}" rpy="0 0 0"/>
<parent link="${parameter01}"/>
<child link="child_${parameter01}"/>
</joint>
</xacro:xacro>
<!-- 模板的使用 -->
<macro_definition_name paranmeter01="1" paranmeter02="2" paranmeter03="3"/><?xml version="1.0"?>
<robot name="mrobot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find mrobot_description)/urdf/mrobot_body.urdf.xacro" />
<!-- MRobot机器人平台 -->
<mrobot_body/>
</robot>代码解读:
<xacro:include filename="$(find mrobot_description)/urdf/mrobot_body.urdf.xacro" />
该行代码用于描述该xacro文件所包含的其他的xacro文件,类似于C语言中include文件
声明包含关系之后,该文件就可以使用被包含文件中的模块
<mrobot_body/>
直接调用该文件的文件名作为标签名即可
在这里,机器人的模型文件全部是在mrobot_body.urdf.xacro文件中使用一个宏来定义的
问题:为何需要mrobot.urdf.xacro文件来包含调用?
这里将整个机器人本体视作一个模块,如果需要与其他模块进行集成,使用这种方式就不需要修改机器人的模型文件,只需要在上层实现一个拼装模块的顶层文件即可,灵活性更强
将xacro文件转换为URDF文件:
$ rosrun xacro xacro.py mrobot.urdf.xacro > mrobot.urdf调用该命令后当前目录下会生成一个URDF文件,然后使用launch文件即可将URDF模型显示在rviz中
可以忽略手动转化模型的过程,直接在启动文件中调用xacro解析器,自动将xacro转为URDF文件
该过程可以在launch文件中使用如下语法进行配置
<arg name="model" default="$(find xacro)/xacro --inorder '$(find mrobot_description)/urdf/mrobot.urdf.xacro'" />
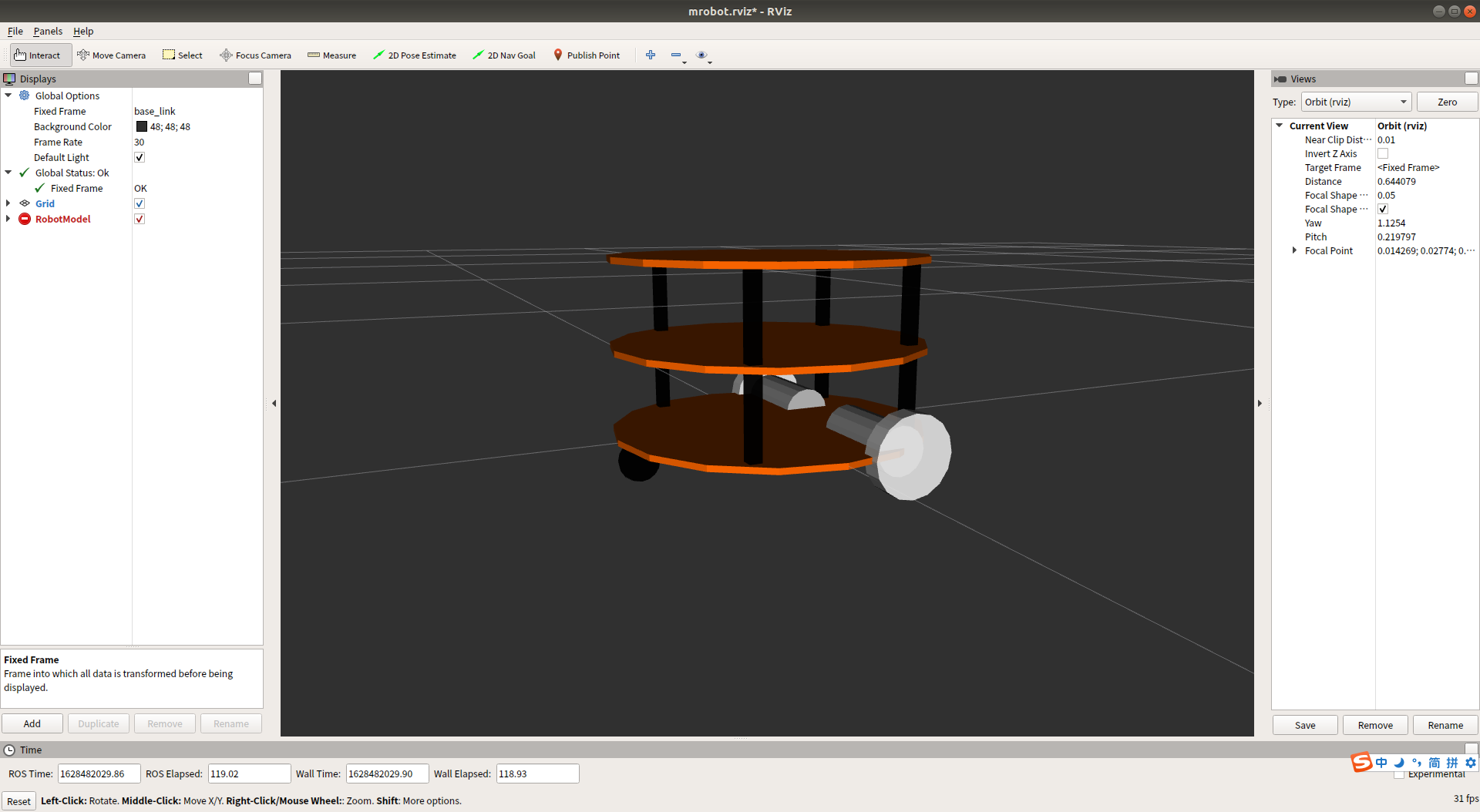
<param name="robot_description" command="$(arg model)" />在终端中运行修改后的launch文件即可启动
结果如下所示:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="camera">
<xacro:macro name="usb_camera" params="prefix:=camera">
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
</collision>
</link>
</xacro:macro>
</robot>成果:

<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="kinect_camera">
<xacro:macro name="kinect_camera" params="prefix:=camera">
<link name="${prefix}_link">
<origin xyz="0 0 0" rpy="0 0 0"/>
<visual>
<origin xyz="0 0 0" rpy="0 0 ${M_PI/2}"/>
<geometry>
<mesh filename="package://mrobot_description/meshes/kinect.dae" />
</geometry>
</visual>
<collision>
<geometry>
<box size="0.07 0.3 0.09"/>
</geometry>
</collision>
</link>
<joint name="${prefix}_optical_joint" type="fixed">
<origin xyz="0 0 0" rpy="-1.5708 0 -1.5708"/>
<parent link="${prefix}_link"/>
<child link="${prefix}_frame_optical"/>
</joint>
<link name="${prefix}_frame_optical"/>
</xacro:macro>
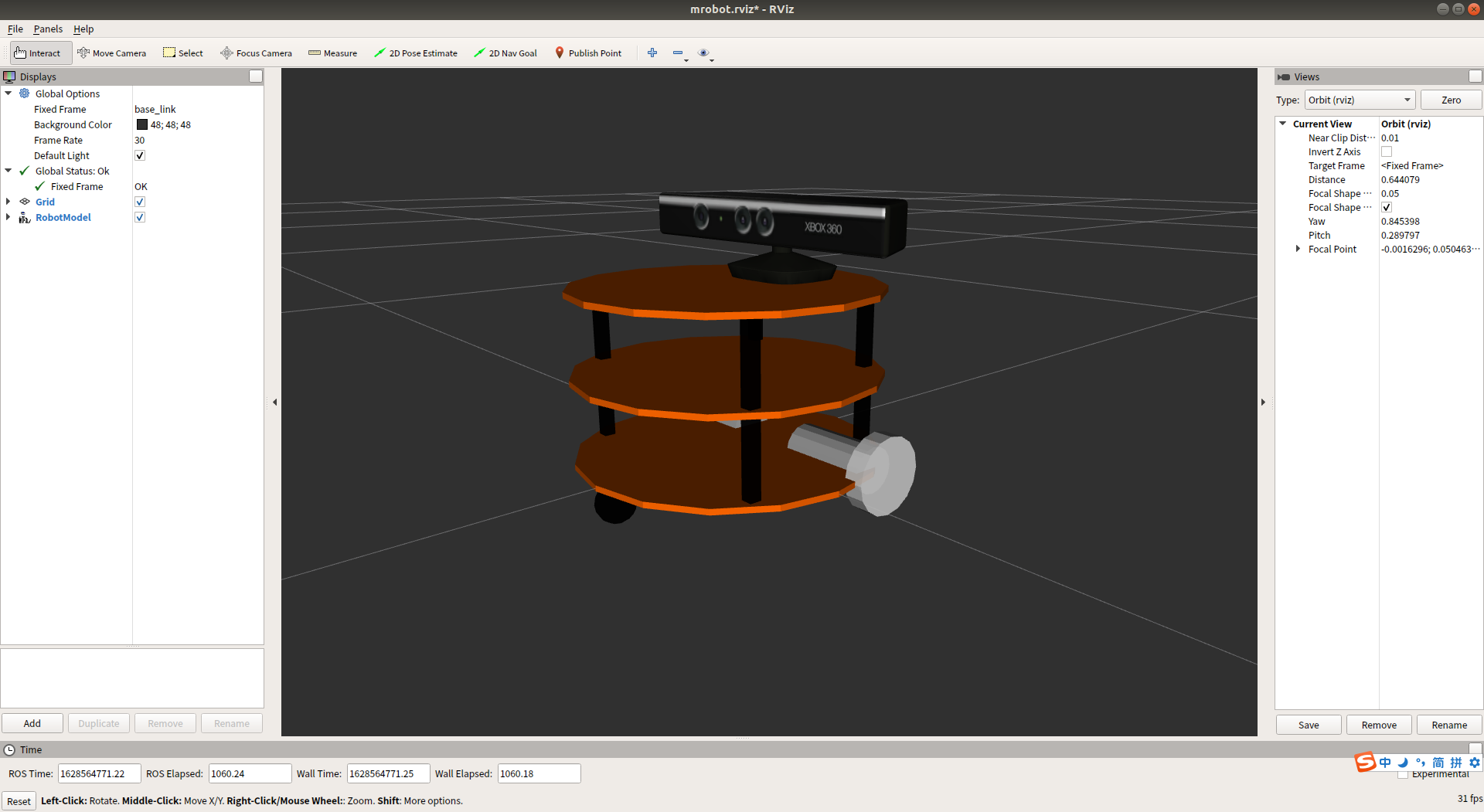
</robot>成果:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="laser">
<xacro:macro name="rplidar" params="prefix:=laser">
<link name="${prefix}_link">
<inertial>
<mass value="0.1" />
<origin xyz="0 0 0" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0"
iyy="0.01" iyz="0.0"
izz="0.01" />
</inertial>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0 0 0" />
<geometry>
<cylinder length="0.06" radius="0.05"/>
</geometry>
</collision>
</link>
</xacro:macro>
</robot>成果:
ArbotiX是一款控制电机、舵机的控制板,并提供了相应的ROS功能包,该功能包不仅可以驱动真实的ArbotiX控制板,还提供了一个差速控制器,通过接受速度控制指令更新机器人的joint状态
问题很大一部分集中于此,《ROS机器人开发实践》一书上所描述的方法基本上全是错误的
首先第一种方法,书中写道:Indigo版本ROS软件源中集成了ArbotiX功能包的二进制安装文件,使用命令如下即可安装:
$ sudo apt-get install ros-indiago-arbotix-*但是目前为止,已在维护的ROS版本的软件源中均已集成ArbotiX功能包的二进制安装文件,只需要将ros-indiago更改为所对应版本即可
$ sudo apt-get install ros-***-arbotix
$ sudo apt-get install ros-***-arbotix-*但是在使用该方式时遇到了另一些问题,在第三节中附解决方法
第二种方法,《ROS》一书中表示使用Git方法对所需ArbotiX功能包进行下载,保存至工作空间中编译即可
$ git clone https://github.com/vanadiumlabs/arbotix_ros.git该方法也存在一定的误区,应使用如下命令:
$ git clone -b indigo-devel https://github.com/vanadiumlabs/arbotix_ros.git原因:在git上下载的一定要选择indigo分支的源码,如果命令中没加上-b indigo-devel,下载的则是默认的最新的noetic版本,里面用的是python3,会和python2路径有冲突(可能会报ImportError:dynamic module does not define module export function(PyInit_tf2)等错误)
注意:安装一定要在/src文件下进行,否则无法识别节点并启动
在原有机器人模型的基础上添加启动arbotix_driver节点即可:
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<rosparam file="$(find mrobot_description)/config/fake_mrobot_arbotix.yaml" command="load" />
<param name="sim" value="true"/>
</node>arbotix_driver可以针对真实控制板进行控制,也可以在仿真环境中使用,但是需要配置sim为true
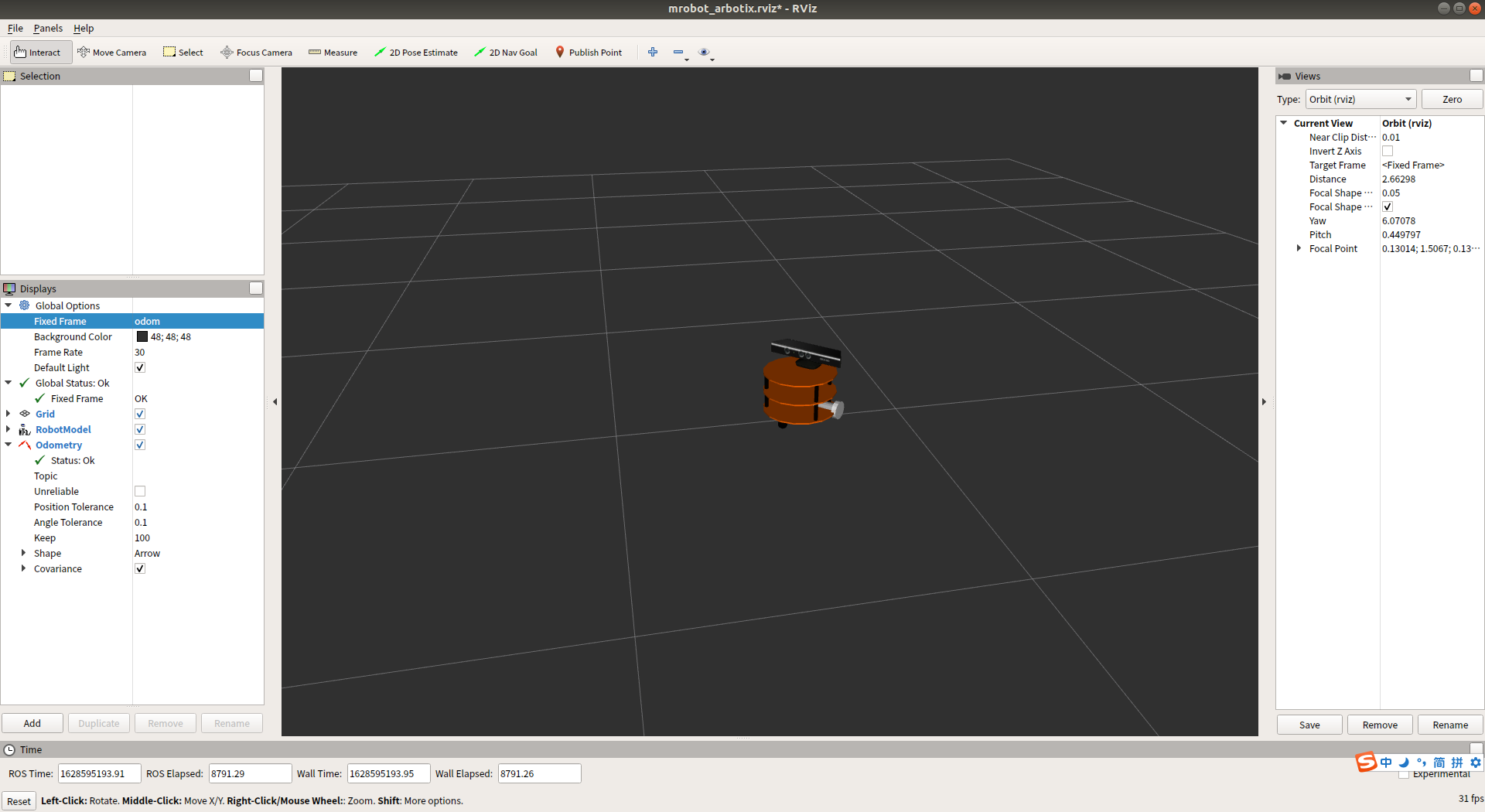
controllers: { base_controller: {type: diff_controller, base_frame_id: base_footprint, base_width: 0.26, ticks_meter: 4100, Kp: 12, Kd: 12, Ki: 0, Ko: 50, accel_limit: 1.0 }}- 仿真环境搭建完成后使用以下命令运行:
$roslaunch mrobot_description arbotix_mrobot_with_kinect.launch- 导入arbotix_driver节点功能包并运行:
$ roslaunch mrobot_teleop mrobot_teleop.launch结果如下所示:
ROS提供了相当多的功能包,如:SLAM、导航、MoveIt等等,但是这些功能包的应用缺少了控制的中间件
ros_control就是应用和实际机器人或者机器人仿真器之间的中间件
ros_control就是ROS为用户提供的应用与机器人之间的中间件,包含一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等等,可以帮助机器人应用快速落地,提高开发效率

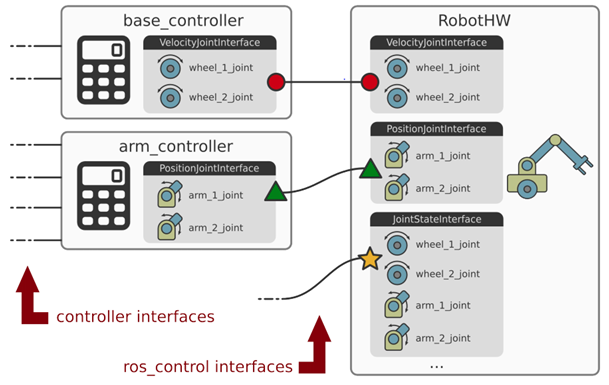
ros_control框架针对不同类型的机器人(移动机器人、机械臂等等)提供了多种类型的控制器(controller),但是这些控制器的接口各不相同
ros_control框架还提供了一个硬件抽象层,负责机器人硬件资源的管理,而controller从抽象层请求资源即可,无需直接接触硬件
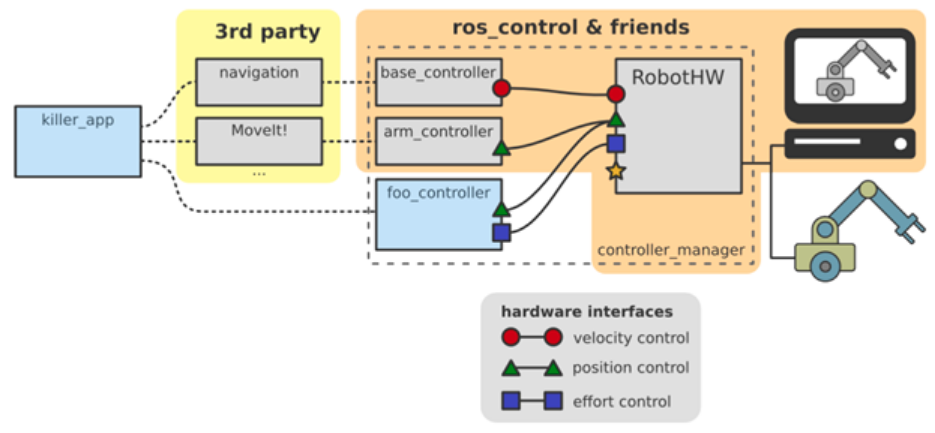
- 控制器管理器(Controller Manager)每一个机器人系统可能会有多个控制器,控制器管理器的作用就是提供一种通用的接口来管理不同的控制器,其输入就是ROS上层应用功能包的输出
- 控制器(Controller)控制器可以完成每个joint的控制,读取硬件资源接口中的状态,然后再发布控制命令并提供PID控制器
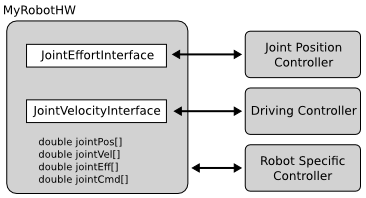
- 硬件资源(Hardware Resource)为上下两层提供硬件资源的接口
- 机器人硬件抽象(RobotHW)机器人硬件抽象和硬件资源直接交互,通过read和write方法完成对硬件的操作,这一层也包含了关节约束、例句转换、状态转换等功能
- 真实机器人(Real Robot)真实机器人上需要有自己的嵌入式控制器,将接收到的命令反映到执行器上
下面反映的就是一个完整的ros_control数据流图
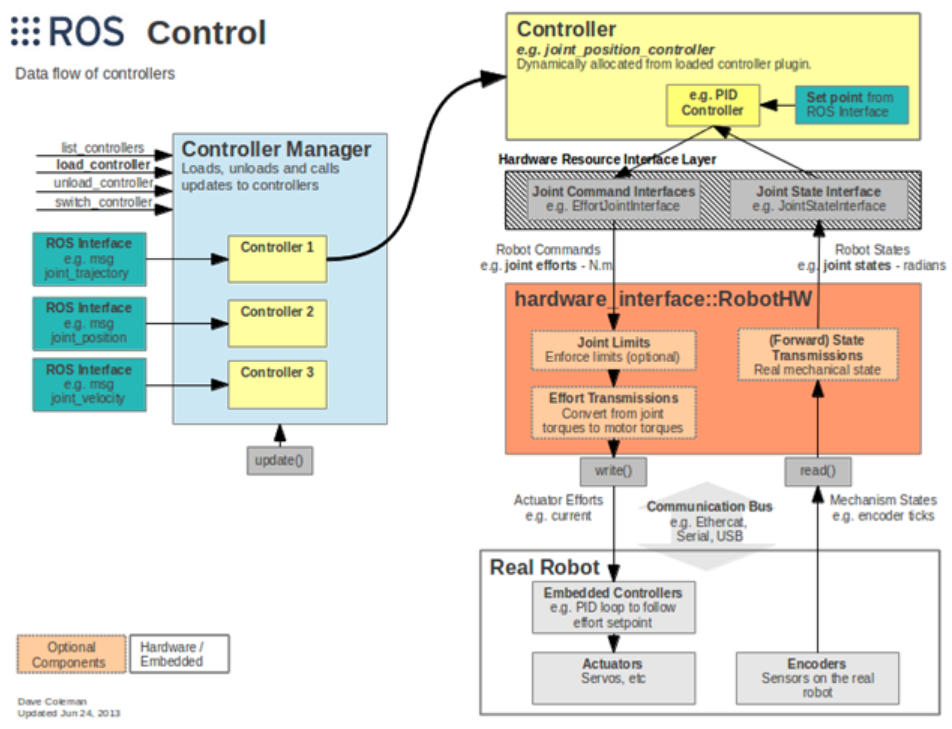
目前ROS中的ros_controllers功能包提供了以下控制器:
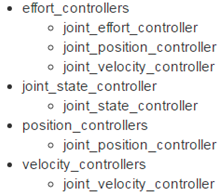
也可以根据自己的需求,创建需要的controller,然后通过控制器管理器(controller manager)来管理自己创建的controller
可参考https://github.com/ros-controls/ros_control/wiki/controller_interface
硬件接口是控制器与机器人硬件抽象(RobotHW)沟通的接口,基本与控制器种类相互对应
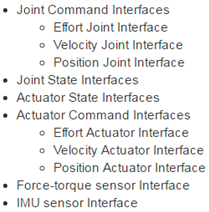
同样可以自己创建需要的接口,可参考https://github.com/ros-controls/ros_control/wiki/hardware_interface
传动系统(Transmission)可以将机器人的关节指令转化为执行器的控制信号
注意:机器人的每一个需要运动的关节都需要配置相应的传动系统
其配置可以在机器人的URDF文件中按照以下方式进行:
<transmission name="simple_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="foo_joint">
<hardwareInterface>EffortJointInterface</hardwareInterface>
</joint>
<actuator name="foo_motor">
<mechanicalReduction>50</mechanicalReduction>
<hardwareInterface>EffortJointInterface</hardwareInterface>
</actuator>
</transmission>关节约束(Joint Limits)是硬件抽象层中的一部分,维护一个关节约束的数据结构
这些约束数据可以从机器人的URDF文件中加载出来,也可以在ROS的参数服务器中加载(需要先用YAML文件导入ROS参数服务器)
其包含的约束包括:关节速度、位置、加速度、加加速度、力矩、位置软限位、速度边界、位置边界等等
可以使用如下方法在URDF中进行设置:
<joint name="$foo_joint" type="revolute">
<!-- other joint description elements -->
<!-- Joint limits -->
<limit lower="0.0" upper="1.0" effort="10.0" velocity="5.0" />
<!-- Soft limits -->
<safety_controller k_position="100" k_velocity="10" soft_lower_limit="0.1" soft_upper_limit="0.9" />
</joint>还有一些参数需要通过YAML配置文件事先加载到参数服务器中,示例如下所示:
joint_limits:
foo_joint:
has_position_limits: true
min_position: 0.0
max_position: 1.0
has_velocity_limits: true
max_velocity: 2.0
has_acceleration_limits: true
max_acceleration: 5.0
has_jerk_limits: true
max_jerk: 100.0
has_effort_limits: true
max_effort: 5.0
bar_joint:
has_position_limits: false # Continuous joint
has_velocity_limits: true
max_velocity: 4.0控制器管理器提供了一种多控制的机制,可以实现控制器的加载、开始运行、停止运行、卸载等多种操作
此外,控制器管理器还提供了多种工具来辅助操作
标准使用格式:
$ rosrun controller_manager controller_manager <command> <controller_name>支持的<command>命令如下所示:
- load:加载控制器
- unload:卸载控制器
- start:启动控制器
- stop:停止控制器
- spawn:加载并启动控制器
- kill:停止并卸载控制器
如果希望查看某一个控制器的状态,使用命令:
$ rosrun controller_manager controller_manager <command>支持的<command>命令如下所示:
- list:根据执行顺序列出所有控制器
- list-types:显示所有控制器的类型
- reload-libraries:以插件形式重新加载所有控制器的库,不需要重新启动,方便对控制器的开发和测试
- reload-libraries--restore:以插件形式重新加载所有控制器的库,并恢复到初始状态
使用spawner命令一次控制多个控制器:
$ rosrun controller_manager spawner [--stopped] name1 name2 name3加上--stop命令表示仅加载不执行
如果想要停止一系列的控制器,但不需要卸载,使用如下命令:
$ rosrun controller_manager unspawner name1 name2 name3在launch文件中,同样可以通过运行controller_manager包的命令,来加载和启动一系列controller
<launch>
<node pkg="controller_manager" type="spawner" args="controller_name1 controller_name2" />
</launch>上边的launch文件会加载并启动controllers,如果只需要加载:
<launch>
<node pkg="controller_manager" type="spawner" args="--stopped controller_name1 controller_name2" />
</launch>controller_manager还提供了可视化工具rqt_controller_manager
安装:rosrun rqt_controller_manager rqt_controller_manager,直接使用下边的命令打开:
$ rosrun rqt_controller_manager rqt_controller_manager首先应该确保每个link的<inertia>元素已经进行了合理的设置
然后为每个必要的<link>、<joint>、<robot>设置<gazebo>标签
每一个link都应该添加<gazebo>标签,其包含的属性只有material,该属性与<visual>中的material作用相同
由于Gazebo无法通过visual来配置外观属性,所以需要单独设置,否则会采用默认的灰白色
<gazebo reference="wheel_${lr}_link">
<material>Gazebo/Black</material>
</gazebo>目的:为驱动机器人提供动力源
需要在模型中加入<transmission>元素,将传动与joint绑定
<!-- Transmission is important to link the joints and the controller -->
<transmission name="wheel_${lr}_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="base_to_wheel_${lr}_joint" />
<actuator name="wheel_${lr}_joint_motor">
<hardwareInterface>VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>代码解析:
<joint name="base_to_wheel_${lr}_joint" />用于绑定对应的驱动器joint<type>transmission_interface/SimpleTransmission</type>用于设定使用的传动装置类型<hardwareInterface>VelocityJointInterface</hardwareInterface>配置使用的硬件接口类型,这里使用的是速度接口类型
Gazebo插件赋予了URDF模型更加强大的功能,可以帮助模型绑定ROS消息,从而完成传感器的方针输出以及对电机的控制
Gazebo插件可以根据插件的作用范围应用到URDF模型的<robot>、<link>、<joint>上,需要使用<gazebo>标签进行包裹
<gazebo>
<plugin name="unique_name" filename="plugin_name.so">
... plugin parameters ...
</plugin>
</gazebo>如果<gazebo>元素中没有设置reference="x"属性,则默认应用于<robot>标签
<gazebo reference="your_link_name">
<plugin name="unique_name" filename="plugin_name.so">
... plugin parameters ...
</plugin>
</gazebo>Gazebo插件支持的种类在ROS默认安装路径下的/opt/ros/melodic/lib文件夹中可以找到
所有插件都是以libgazeboXXX.so方式进行命名的
Gazebo提供的差速控制插件的应用
<!-- controller -->
<gazebo>
<plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<!-- 机器人命名空间,插件所有数据的发布、订阅都在该命名空间中 -->
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<!-- 左右轮转动的关节joint,插件需要控制这两个joint转动 -->
<leftJoint>base_to_wheel_left_joint</leftJoint>
<rightJoint>base_to_wheel_right_joint</rightJoint>
<!-- 模型相关尺寸,在计算差速参数时会用到 -->
<wheelSeparation>${base_link_radius*2}</wheelSeparation>
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<wheelTorque>30</wheelTorque>
<!-- 车轮转动的加速度 -->
<wheelAcceleration>1.8</wheelAcceleration>
<!-- 控制器订阅的速度控制指令,在ROS中通常都命名为cmd_vel -->
<commandTopic>cmd_vel</commandTopic>
<!-- 里程计数据的参考坐标系,在ROS中通常为odom -->
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_footprint</robotBaseFrame>
</plugin>
</gazebo> 首先需要更改launch文件,运行Gazebo并加载机器人模型,并启动必要节点
<launch>
<!-- 设置launch文件的参数 -->
<arg name="world_name" value="$(find mrobot_gazebo)/worlds/playground.world"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mrobot_gazebo)/urdf/mrobot.urdf.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>该launch文件中主要做了两项工作:
- 启动机器人状态并发布节点,同事家在带有Gazebo属性的机器人URDF模型
- 启动Gazebo,并将机器人模型加载到Gazebo仿真环境中
启动命令:roslaunch mrobot_gazebo view_mrobot_gazebo.launch
结果如下所示:
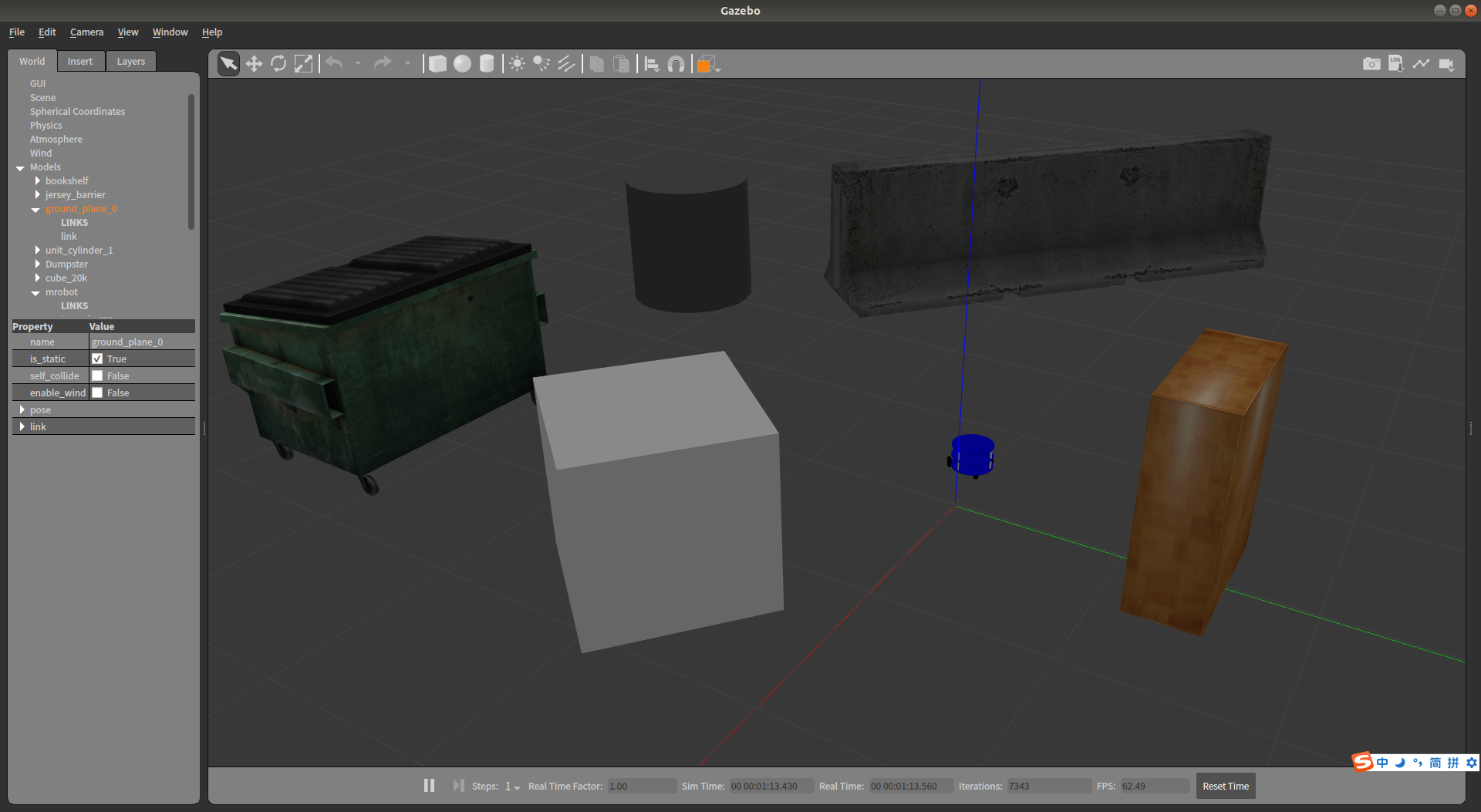
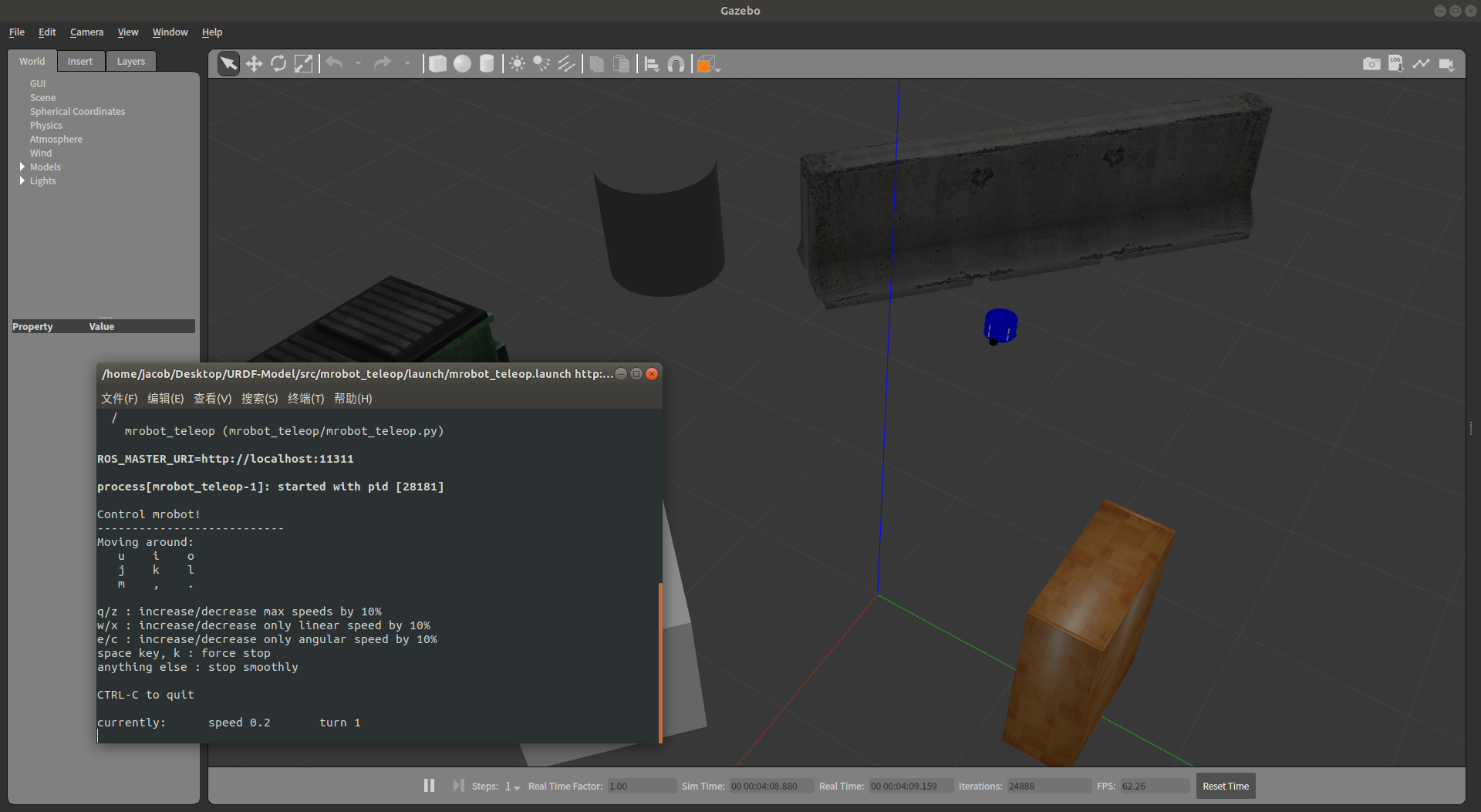
由于模型中已经加入了libgazebo_ros_diff_drive.so插件,可以使用差速控制器控制机器人运动
启动命令:$ roslaunch mrobot_teleop mrobot_teleop.launch,即可运转
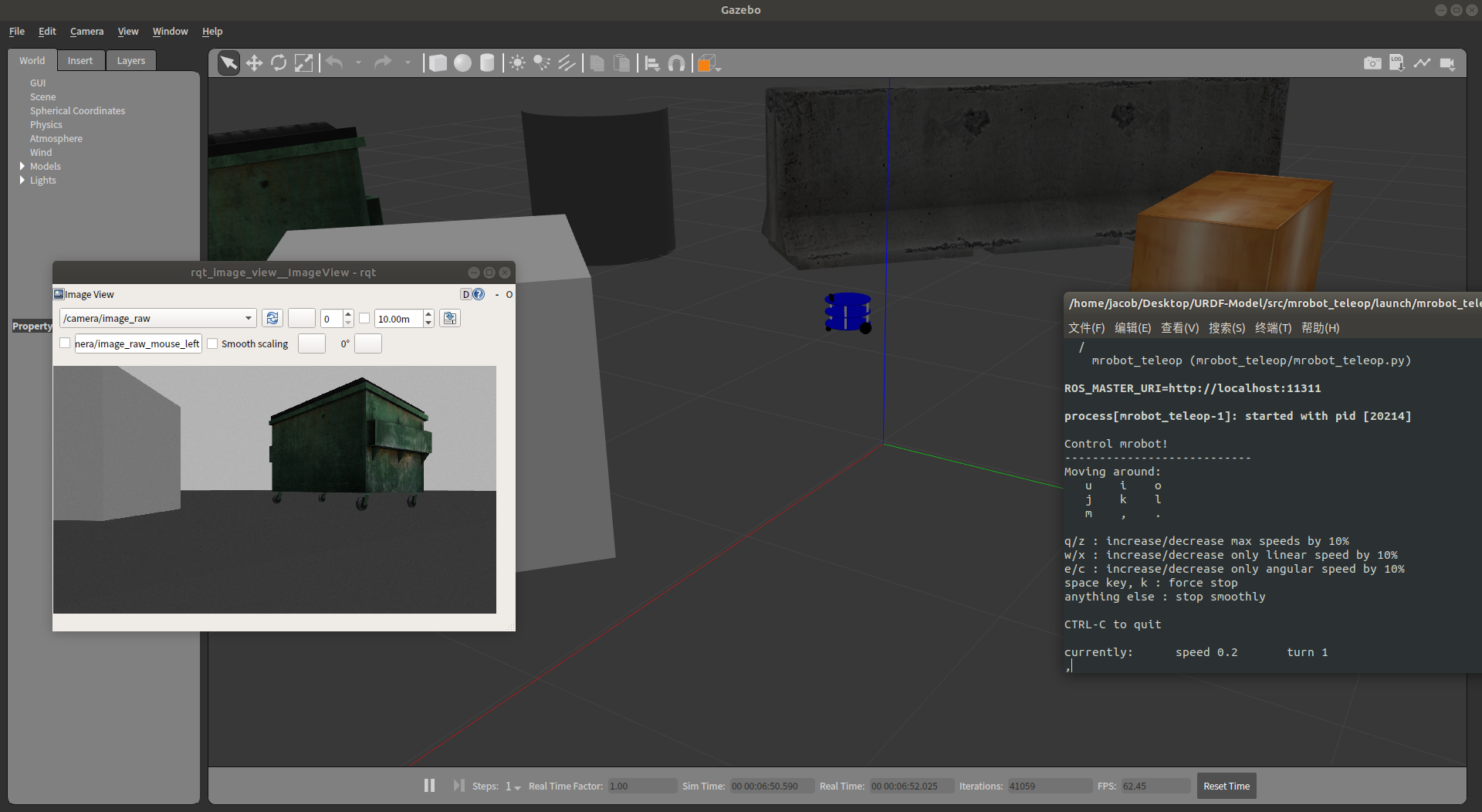
为机器人模型添加一个摄像头插件,让机器人能看到Gazebo中的虚拟环境
同样的需要在摄像头camera的URDF模型文件中添加<gazebo>相关配置
两个标签分别配置模型的样式和配置摄像头的各种属性
配置完成后运行仿真环境:roslaunch mrobot_gazebo view_mrobot_with_camera_gazebo.launch
使用rqt工具查看当前机器人眼前的世界
$ rqt_image_view启动结果如下所示:
同样的,使用标签对URDF模型中的参数进行相关配置
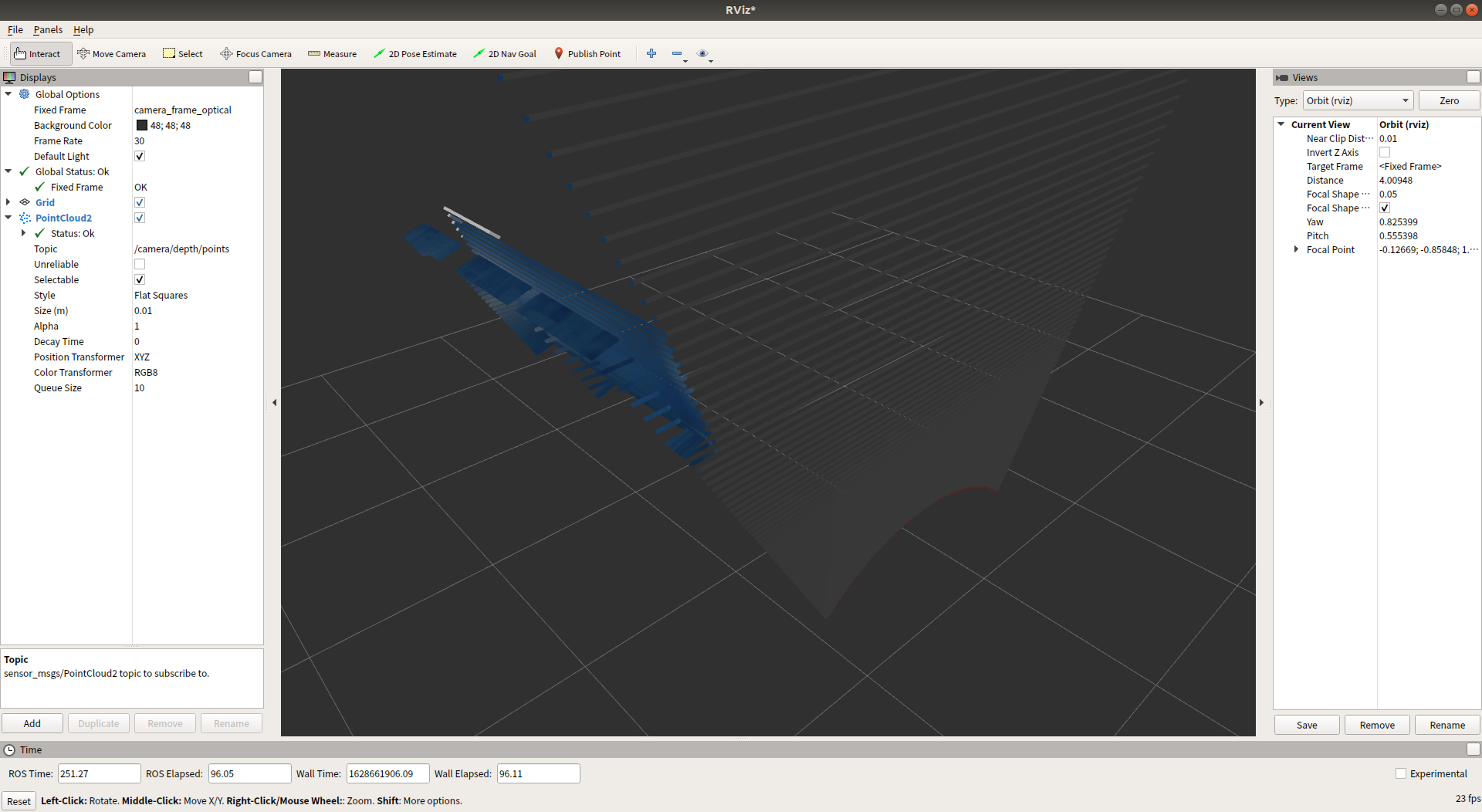
完成后运行仿真环境:roslaunch mrobot_gazebo view_mrobot_with_kinect_gazebo.launch
运行仿真环境后可以使用RViz查看Kinect的点云数据:
$ rosrun rviz rviz如果要在RViz中查看点云信息需要在软件中将Fixed Frame设置为
camera_frame_optical并添加PointCloud2类型插件
结果如下所示:
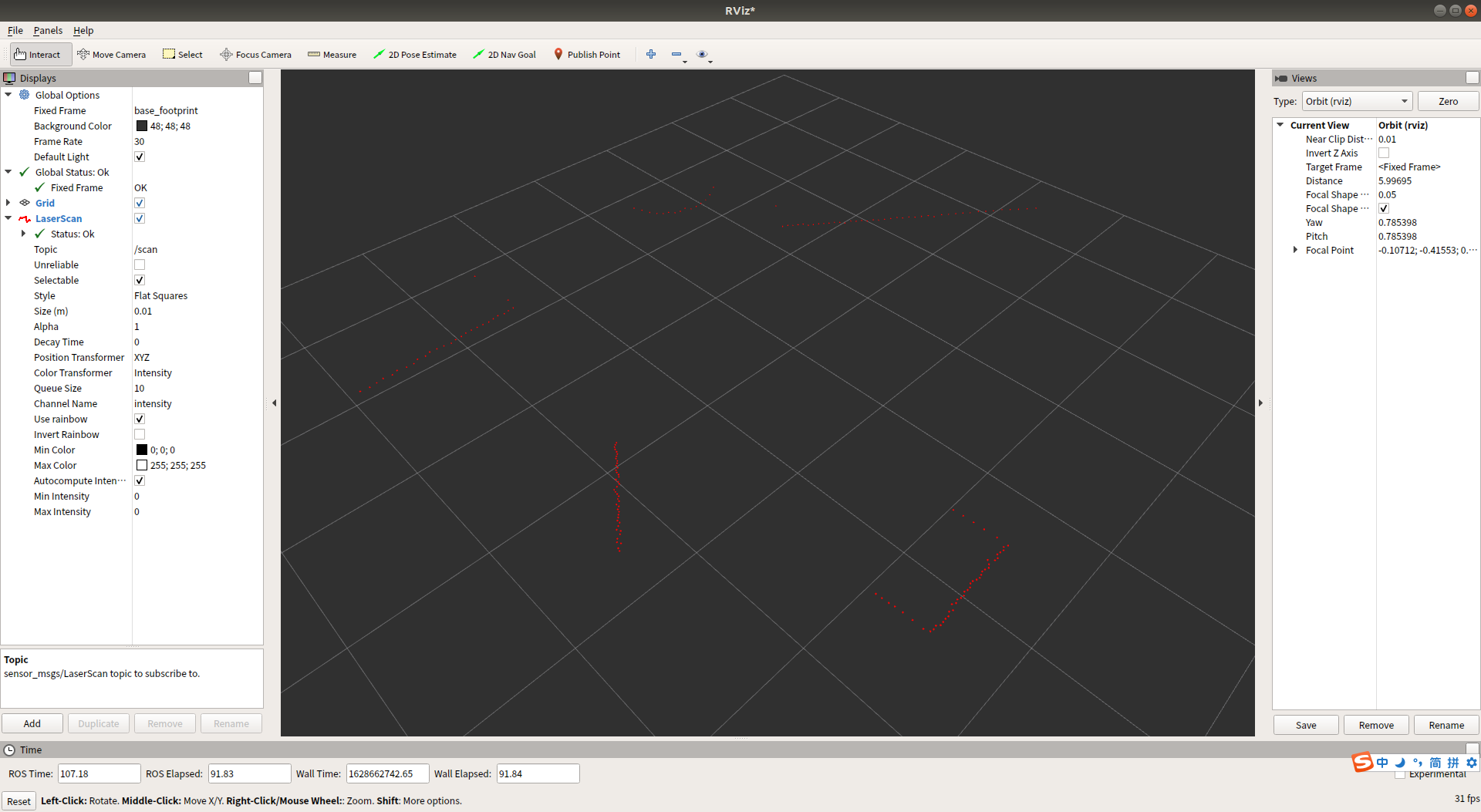
同摄像头仿真和Kinect仿真,激光雷达仿真在配置gazebo相关设定后启动
$ roslaunch mrobot_gazebo view_mrobot_with_laser_gazebo.launch另外使用RViz可以查看激光数据
$ rosrun rviz rviz如果要在RViz中查看点云信息需要在软件中将Fixed Frame设置为
base_footprint并添加LaserScan类型插件
结果如下所示:
在使用roslaunch mrobot_description display_mrobot_chassis_urdf.launch命令后启动launch文件
成功启动三个节点并打开了Rviz软件,但是软件中出现了如下问题并无法展示URDF模型
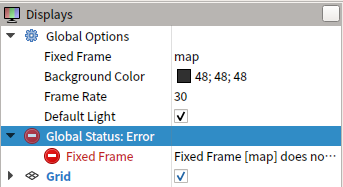
- 解决办法
第一步:打开终端输入指令
$ rosrun tf static_transform_publisher 0 0 0 0 0 0 map base_link 50第二步:在rviz软件界面左上角Fixed Frame的map选项该改成base_link
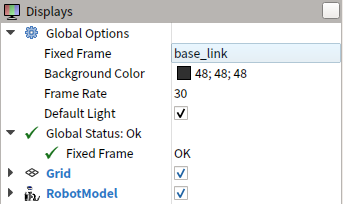
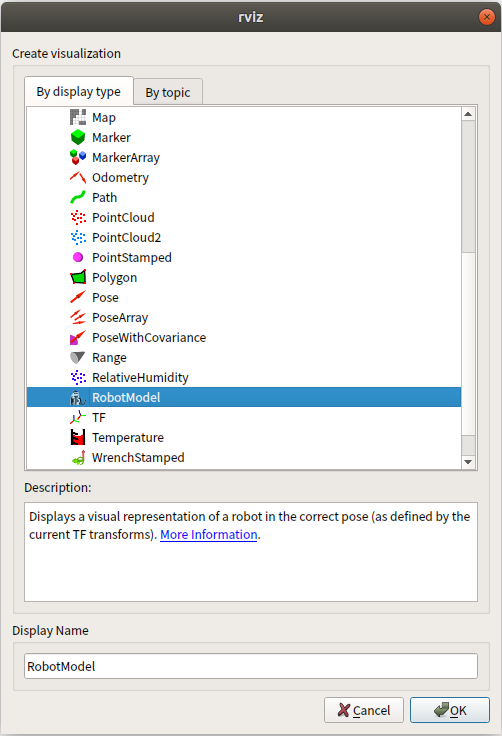
第三步:在rviz软件左下角点击Add按键,出现弹窗并选择RobotModel,点击OK即可正确展示
在1.4.1转化模型中控制台出现错误如下:

原因是在mrobot.urdf.xacro文件中出现的<xacro:include filename="$(find mrobot_description)/urdf/mrobot_body.urdf.xacro" />
由于路径的问题,解析器无法找到对应的mrobot_description文件夹
将其更正为相对路径即可解决:<xacro:include filename="../urdf/mrobot_body.urdf.xacro" />
在安装ArbotiX时,如果采用了第一种方式进行安装,很有可能会出现资源包无法找到并报404的错误
首先需要使用命令sudo apt-get update,控制台报错EXPKEYSIG F42ED6FBAB17C654 Open Robotics <info@osrfoundation.org>
这个问题主要原因是ROS GPG密钥过期
- 解决办法:
控制台输入命令:
# 更新密钥$ sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654# 更新软件源$ sudo apt-get update安装并更新密钥后即可解决ROS资源包并报404错误的问题
- 暴力解法:
直接在资源库中找到相应资源包并安装,网址:http://packages.ros.org/ros/ubuntu/pool/main/r/
在首次运行命令式出现如下错误,问题根本原因在于没有安装Gazebo仿真环境
- 解决办法:
$ sudo apt-get install ros-melodic-gazebo-ros-pkgs ros-melodic-gazebo-ros-control运行终端命令启动Gazebo报错,Gazebo页面卡住黑屏,在终端出现Gazebo [Err] [REST.cc:205] Error in REST request
- 解决办法:
$ sudo gedit ~/.ignition/fuel/config.yaml打开文件并将url : https://api.ignitionfuel.org修改为url: https://api.ignitionrobotics.org