
I'm an M.Sc. student in Computer Engineering (Artificial Intelligence) at the University of Genoa,
and a Research Assistant at CNR-IEIIT within the EU Horizon Europe project REXASI-PRO.
My thesis focuses on trajectory-level evaluation of neural motion prediction models
for autonomous wheelchair navigation — specifically, understanding when and why
pretrained neural predictors generate unstable or unsafe trajectories under varying input conditions.
I work at the intersection of model reliability analysis, interpretable evaluation frameworks,
and safety-critical autonomous systems.
MSc Thesis — University of Genoa / CNR-IEIIT / REXASI-PRO
Trajectory-level evaluation of pretrained neural wheelchair navigation models (DNN-LNA)
across a wide range of operational input conditions.
Two complementary experiments:
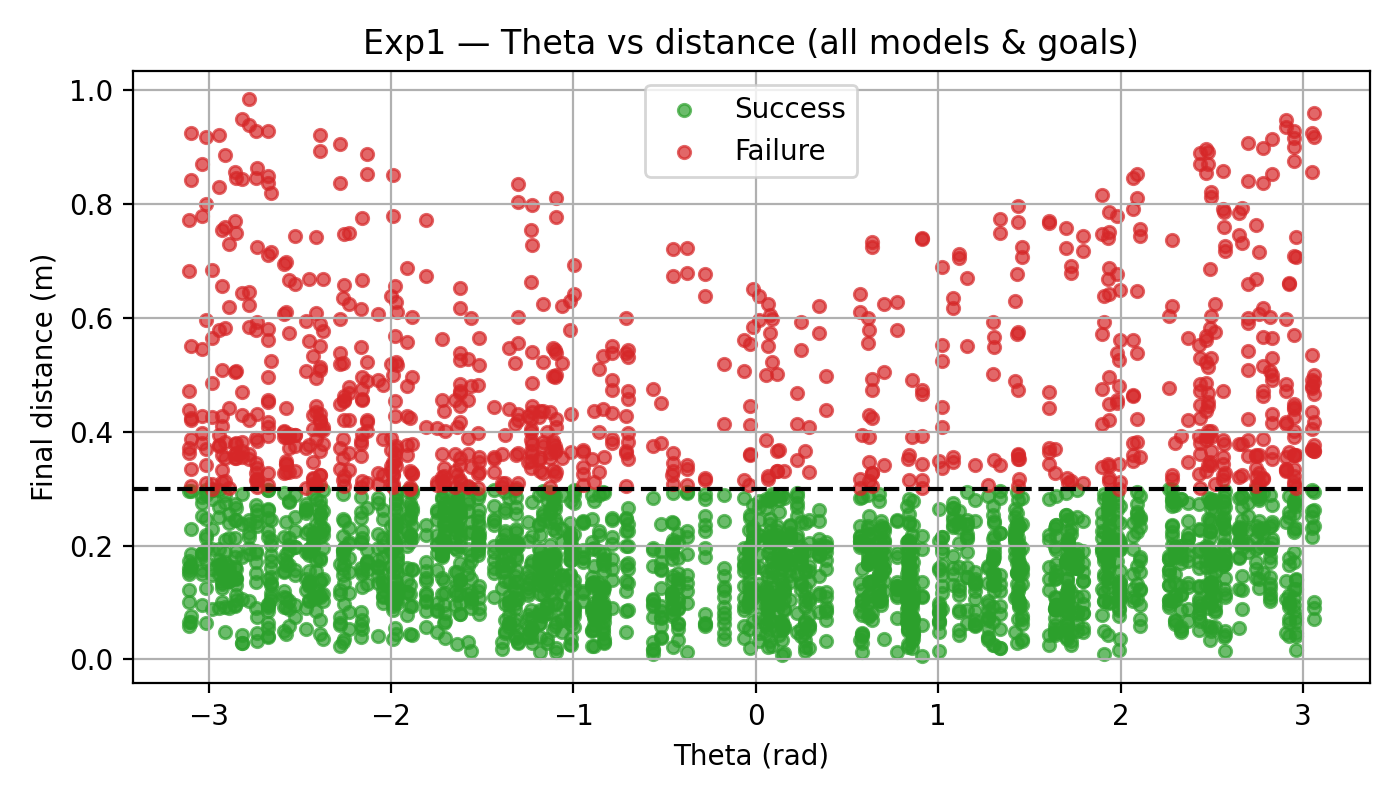
- Exp1 — Input Sensitivity: How do initial orientation (φ), linear velocity (v), and angular velocity (ω) affect trajectory stability? Risk maps identify command regions prone to unstable predictions.
- Exp2 — Goal Difficulty: Which target positions are inherently harder for neural predictors? Goal difficulty maps reveal spatial failure patterns across the workspace.
Key findings:
- Initial orientation φ is the dominant risk factor — failures concentrate near ±π (robot facing away from goal)
- Strict vs. soft success criteria reveal stability differences between models invisible to binary metrics
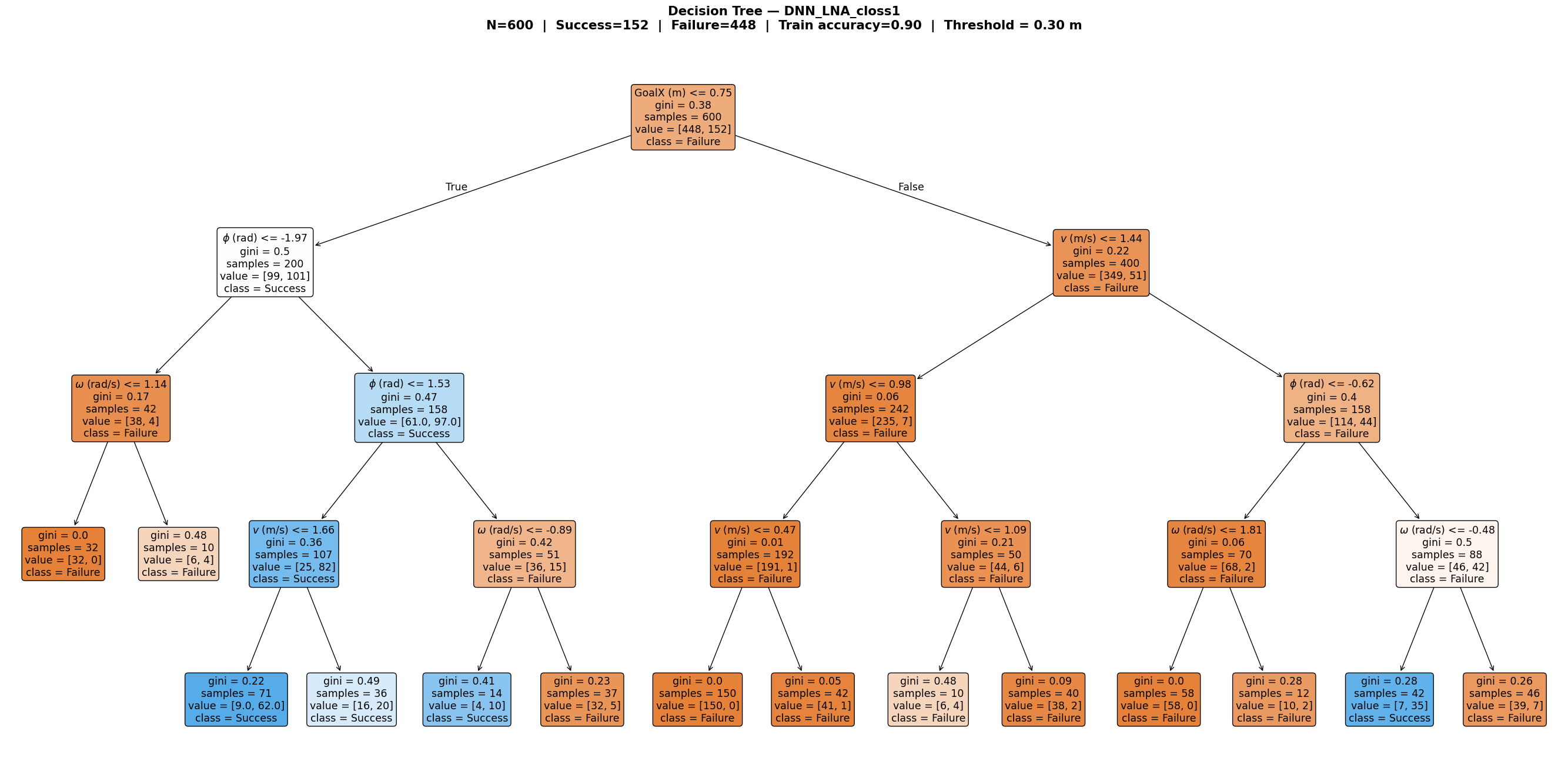
- DNN-LNA-closs2 achieves 99.3% strict success; DNN-LNA-closs1 only 25.3%
- Risk maps enable concrete run-time safety applications: command filtering, hybrid fallback planners, predictive failure monitoring
Personal Project — Trajectory Behaviour Analysis Toolkit
A modular Python toolkit for evaluating stability and reliability of neural trajectory predictors
in assistive navigation systems. Developed independently to extend and complement the thesis analysis.
- Trajectory risk scoring and failure-case cataloguing
- Interpretable ML explanations via decision trees and random forests
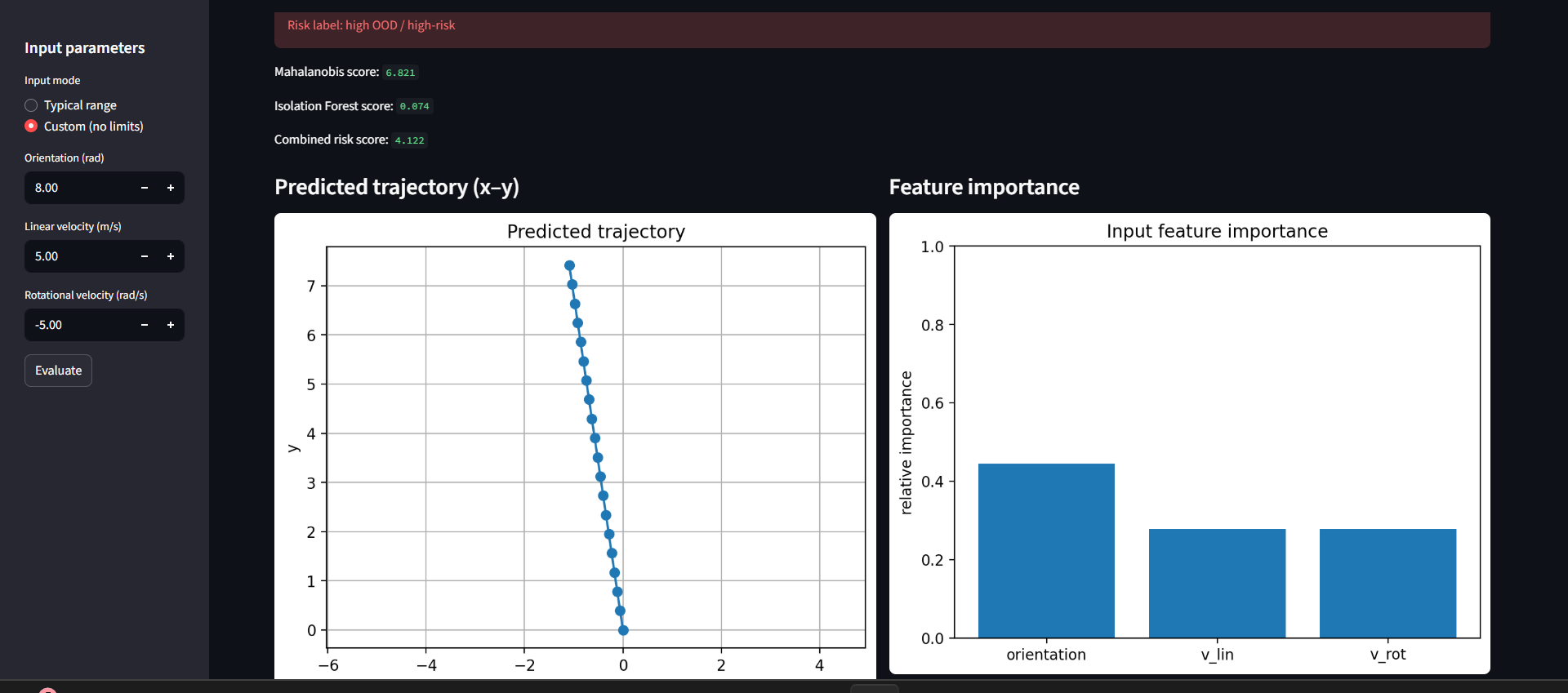
- Interactive Streamlit dashboard for real-time trajectory exploration
- Optional LLM-based natural language safety report generation
Safety-Constrained Reinforcement Learning for Assistive Robot Navigation
A natural extension of the thesis work: rather than only analysing when neural predictors fail,
this project trains RL agents with intrinsic collision-avoidance constraints from the ground up.
- PPO with Control Barrier Function (CBF) safety layer
- Curriculum learning across 3 progressive difficulty stages
- Domain randomization for sim-to-real robustness
- ROS2 node scaffold for real robot deployment
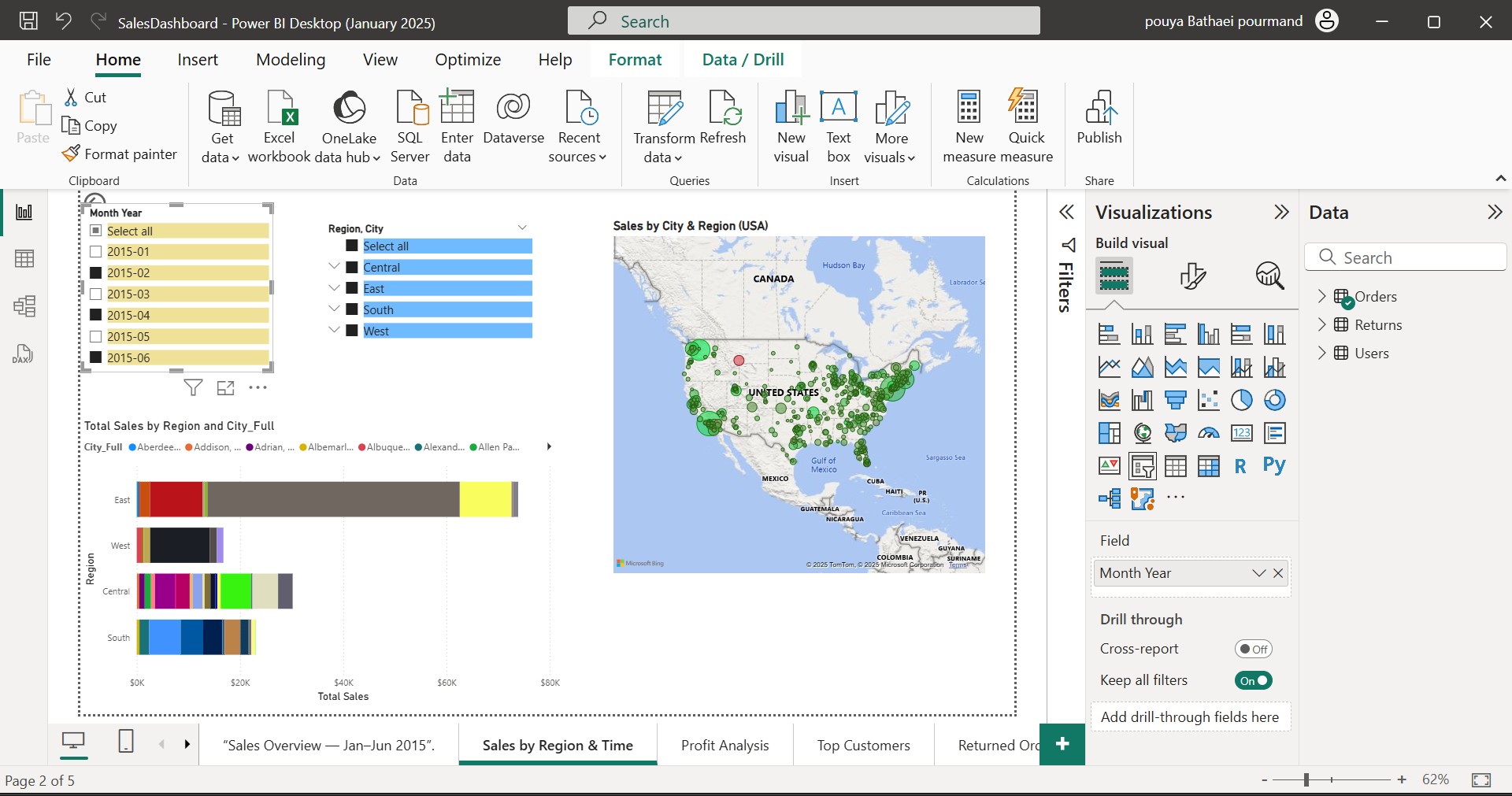
A complete BI workflow with Python data cleaning, SQL validation, and interactive Power BI dashboard.
AI & Machine Learning
Python · PyTorch · scikit-learn · NumPy · pandas · OpenCV
Research Focus
Trajectory-level evaluation · model reliability · failure mode analysis ·
interpretable ML · safety-critical autonomous systems · neural motion prediction
Reinforcement Learning
PPO · policy gradient methods · custom Gym environments · safety-constrained RL
Tools
Git · Jupyter · Streamlit · ROS2 · SQL · Power BI · TensorBoard
🔗 LinkedIn: https://www.linkedin.com/in/pouya-pourmand-021654325
📧 Email: pouyapd68@gmail.com