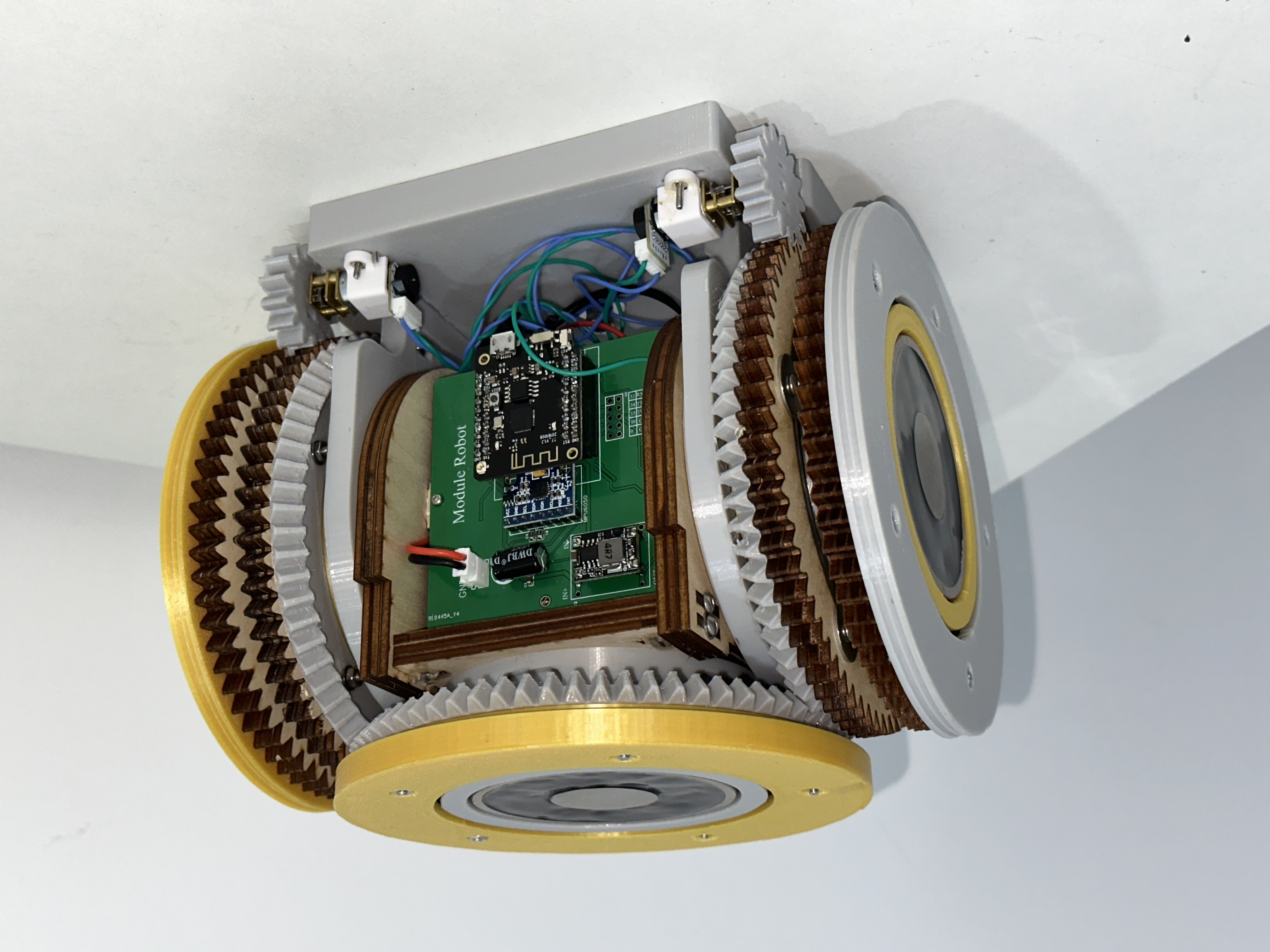
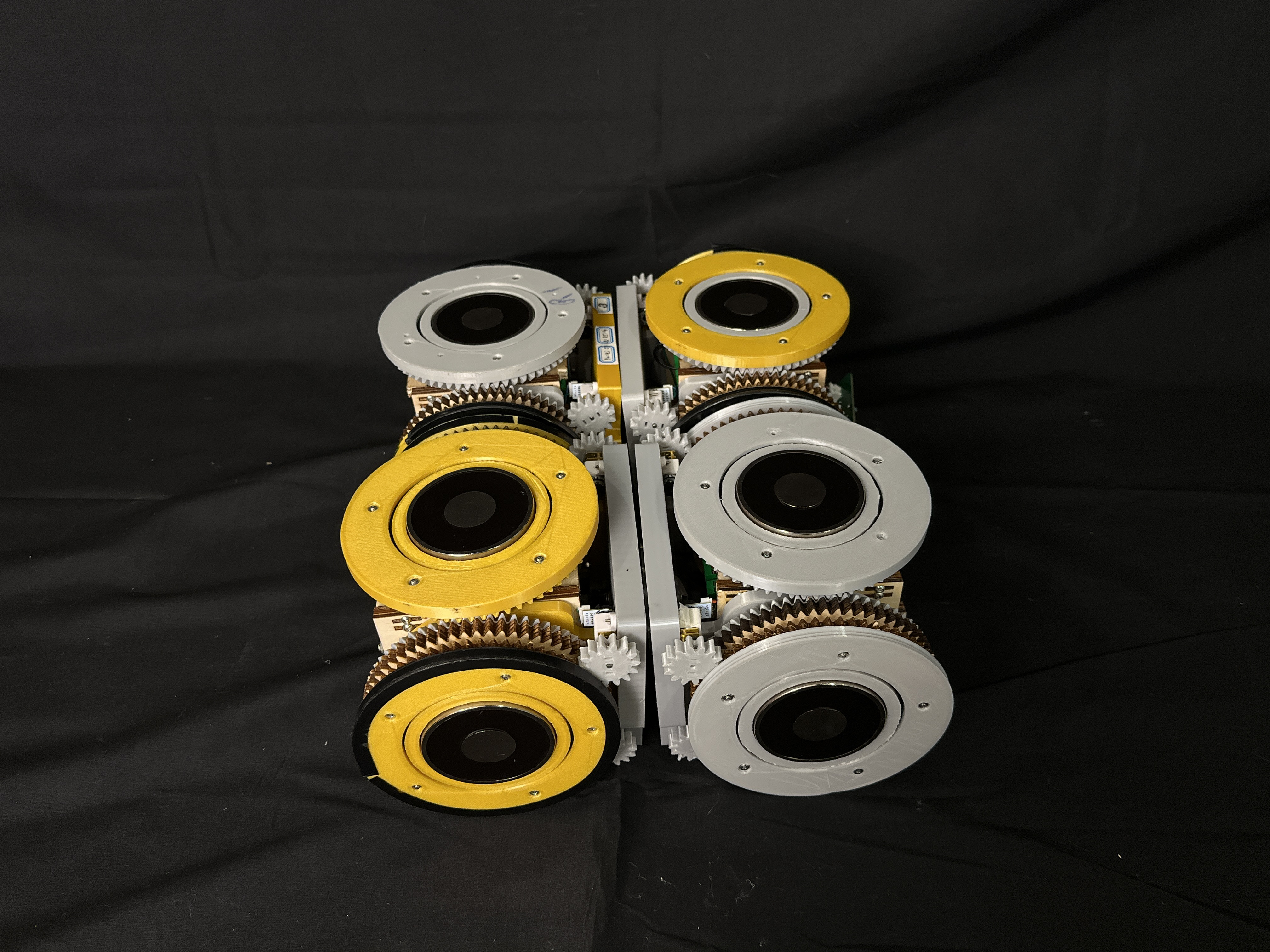
This project showcases the design and manufacturing of a self-assembling modular robotic system, with each robot possessing 4 degrees of freedom, wheel-based locomotion, Bluetooth and Wi-Fi capabilities, and an electromagnet-based connection system.
Controlled through a combination of AprilTags, computer vision using OpenCV, and PID controllers for precise position and movement instructions, the system's functionality has been validated through extensive tests. These tests include assessing the robot's speed in various assembly configurations, speed under cargo load, and the strength of inter-robot connections. Simulated challenging environments were created to validate the overall self-assembly performance of the robotic system.
During the spring of 2022, Shanghai went into a 3-month long lockdown, due to a major Covid-19 outbreak. During that time we were unable to leave our homes and for many weeks we had a hard time getting supplies and food or getting anything delivered since essential logistics and delivery workers were unable to go to work.
During that time I started researching: "How can we increase the reliability of logistics and delivery networks?" Many of the ideas that popped up during that initial research mentioned flexibility and adaptability in the industry and in the subprocess (eg. last-mile delivery, warehousing, transportation, etc.).
Going off of my past robotics experience, I knew that modular robots met the exact characteristics mentioned above. Seeing current modular robotics research focused on search & rescue and static applications of modular robots (such as sending them to Mars before humans to build structures), I wondered: "Can we use robots that solve challenges together to increase reliability and decrease human dependence of logistics systems?”
I began this project to build a self-assembling modular robot system for logistics, though its design can be applied to other use cases as well. Although this is just a proof-of-concept system, I hope the insights from this research can open up possibilities for further industrial applications of modular robotics. By doing so, I hope that this critical part of our daily lives becomes more resilient against extreme situations