


Electrical & Computer Engineering Student @ USC Building at the intersection of Embedded Systems, Robotics, and AI.
I am an engineering student and researcher passionate about integrating hardware with intelligent software. From building self-assembling robots to developing RAG pipelines for LLMs, I love solving complex problems that bridge the physical and digital worlds.
Languages
Hardware & Embedded
AI & Software
Summer 2025
- RAG Pipeline Optimization: Architected a knowledge-graph-augmented Retrieval-Augmented Generation (RAG) pipeline using Alibaba Bailian and KuzuDB.
- Achieved a 40% increase in retrieval relevance and reduced system latency by 20% by optimizing graph queries and vector-database integration.
- Engineered a unified retrieval strategy combining vector search, KG neighbor expansion, semantic filtering, and deduplication.
- LangChain Agent Development: Developed advanced agents capable of executing KG-driven contextual reasoning and multi-hop retrieval.
- These agents enabled more accurate evidence assembly across graph nodes, significantly improving semantic search outputs for real-world workloads.
- High-Performance Data Engineering: Implemented a robust KnowledgeGraph module supporting fast CSV ingestion, schema construction, and efficient traversal operations to accelerate KuzuDB-based tasks.
- Documented the full architecture and performance-tuning strategies for scalable deployment.
August 2024 - Present
- Locomotion Algorithm Design: Researching multi-legged robot locomotion with a focus on body-leg phase coordination.
- Redesigned phase-control algorithms by converting degree-based coordination into normalized phase offsets.
- This improved gait consistency, interpretability, and cross-condition comparability for downstream analysis.
- Experimental Validation: Executed 46 physical trials using OptiTrack IR-marker 3D kinematics to characterize performance across various coordination regimes.
- Hardware & Mechanical Iteration: Improved mechanical system reliability by refining servo-mount clearances, gear spacing, and cable routing.
- Redesigned electronics enclosures to enhance durability and dust resistance for operation in cluttered/obstacle-heavy environments.
August 2025 - Present
- Leadership: Leading a 6-member engineering team to build "SkateMo," an autonomous self-driving skateboard, owning the integration of perception, navigation, and embedded control.
- Perception & Path Planning: Building real-time obstacle avoidance logic using OpenCV and YOLO with camera/IMU sensor fusion.
- Designed Finite State Machine (FSM) based path-planning to handle skateboard-like steering dynamics.
- Embedded Control: Developing BLDC motor-control firmware to handle speed regulation, current limiting, and direction control.
Project Manager | USC Makers Currently leading a team to build a self-driving skateboard.
- Tech: OpenCV, YOLO, IMU Sensor Fusion, BLDC Motor Control.
- Role: Designing path-planning logic (FSM-based) and implementing embedded control firmware.
🏆 Winner - Best Hardware Project (LA TechWeek Good Vibes Only Hackathon)


A sensory regulation headset designed to detect and mitigate visual and auditory overstimulation for neurodivergent individuals.
- Hardware: NVIDIA Jetson Orin Nano, Servo-controlled Visor, RGB LEDs.
- Software: Python (Multithreading), OpenCV (Brightness tracking), SciPy (Audio filtering), Flask API.
- Function: Automatically adjusts visor tint and noise cancellation based on real-time environmental analysis.
Independent Research
A fully automatic modular robot system where individual units can locate, attach, and reconfigure themselves to complete tasks.
- Mechanism: 4-DoF modules with electromagnetic connection interfaces.
- Control: ESP32 Microcontrollers, PID control for precise movement.
- Swarm Logic: Uses computer vision (AprilTags) for localization and assembly.


EE250 Final Project
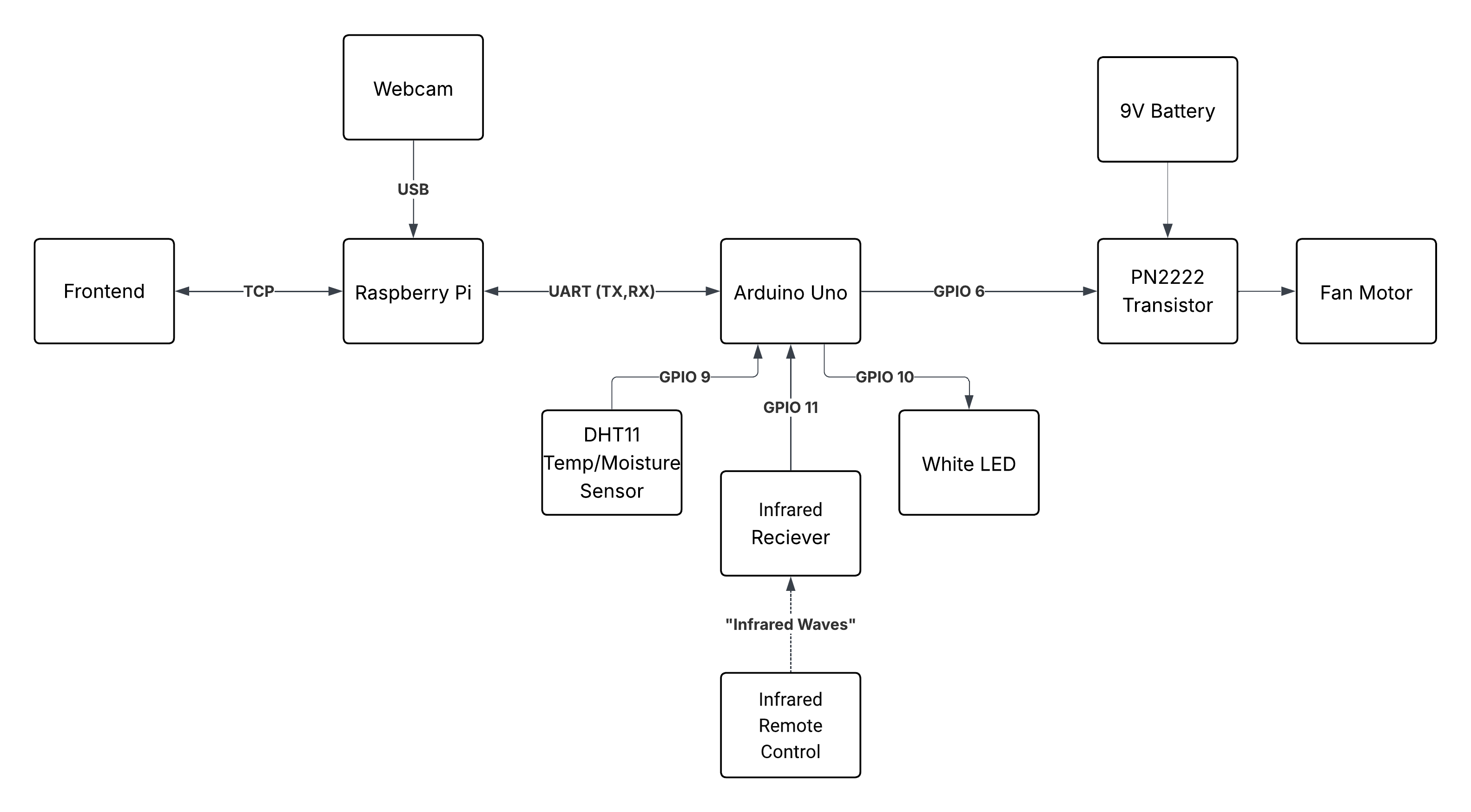
An automated environment management solution utilizing a distributed "Master-Slave" architecture.
- Stack: Raspberry Pi 4 (Master/Vision), Arduino Uno (Slave/Actuation).
- Features: YOLOv3-Tiny for human detection, web dashboard for control, and UART communication protocol.
- Repo: Link to Project
Wireless Systems Lead | USC Makers A wireless motion-tracking wearable providing real-time haptic feedback for martial arts training.
- Tech: ESP32, MPU6050 (6-DoF IMU), Unity Game Engine.
- Role: Designed custom PCB and implemented low-latency wireless communication (UDP/TCP).
Independent Research
.jpg)
A low-cost, quiet alternative to commercial braille embossers using a novel camshaft design.
- Cost: ~$160 USD (vs. $2000+ commercial options).
- Performance: <60dB noise level with consistent dot height tolerance (±0.12mm).